Hello Everyone… I have taken quite a deep dive into my Emlid Reach RS+ and have a few questions about some of the settings and functionality.
How to change from Meters to Feet
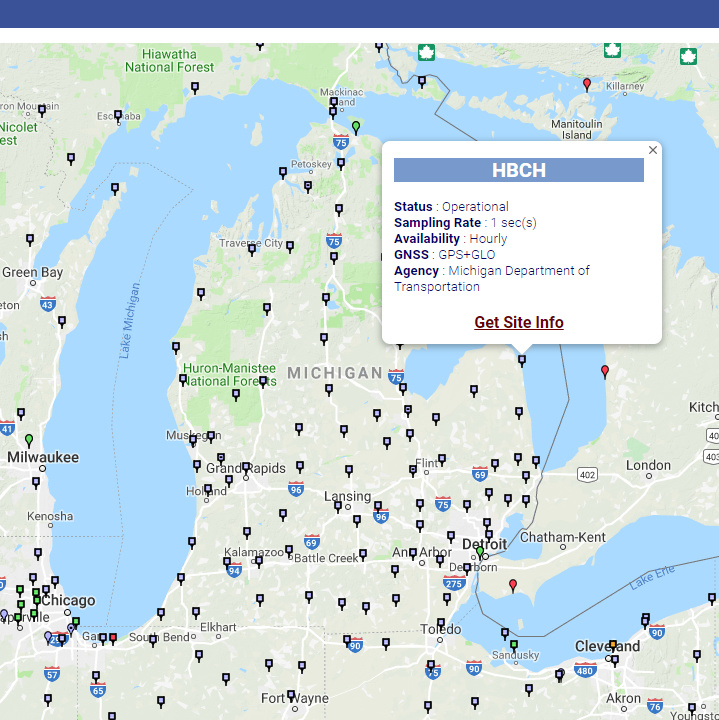
Am I able to hook into an actual CORS station?
How am I able to post process the information from just the base unit while not using the logs from the rover as well…
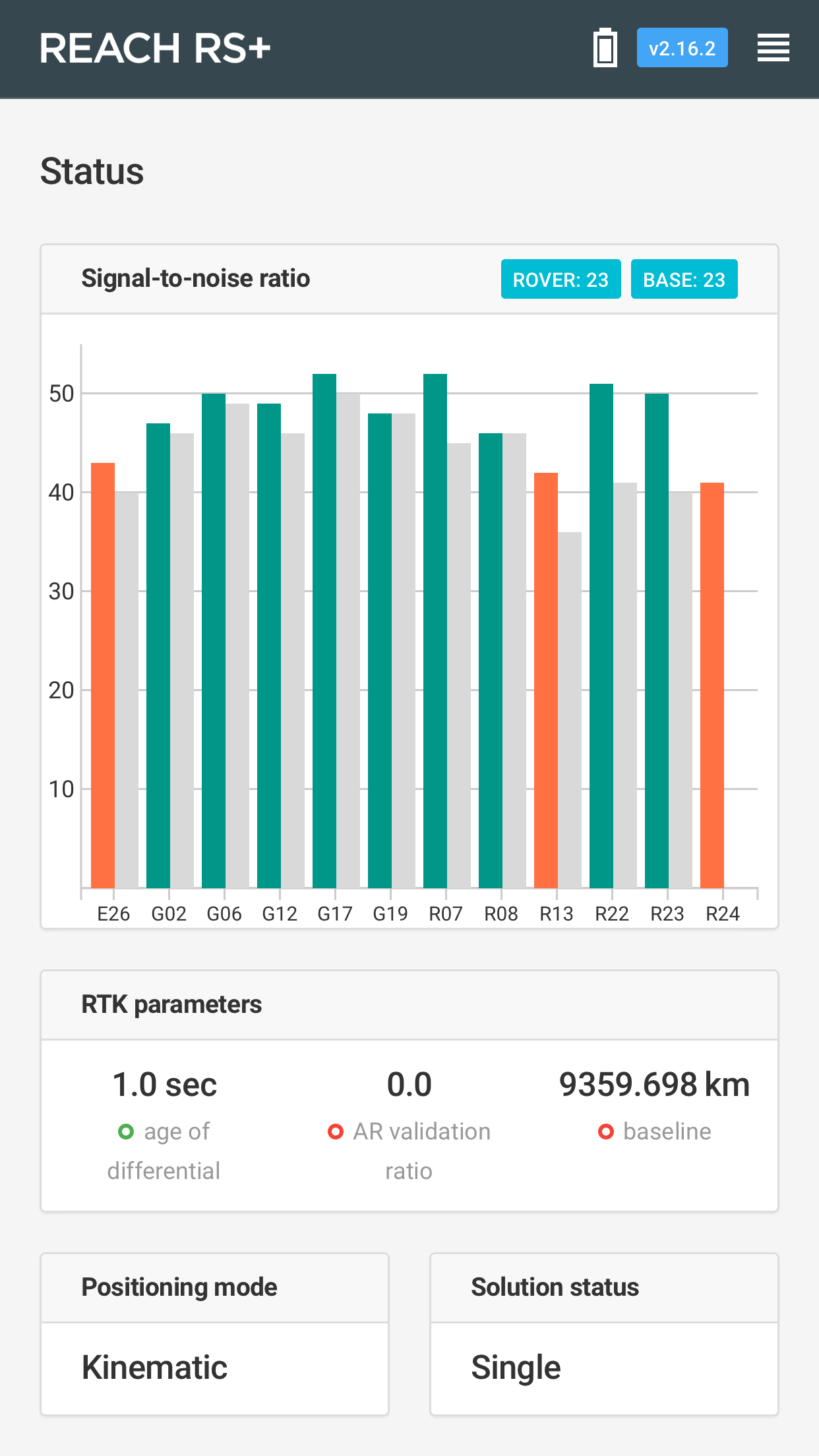
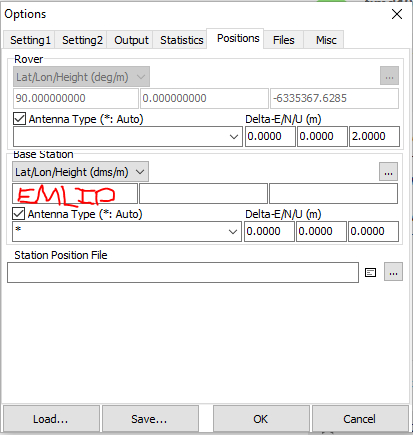
A major problem I am having is when I try to input points manually into Base Mode I am loosing my fix and float status and it goes into single mode and also sets my baseline to 10,000M. Is there any tips for this? I am trying to input a point for my base so I can place the base in the same location every time. Screenshot is attached. Thanks in advance!!
Not able to “yet”. I would assume they would incorporate that into a future feature when / if for Coordinate Systems and Localization. i.e. Meters, International Feet,U.S. Survey Feet. This is something desperately needed.
If you want on the fly meter to US Survey Feet etc, you’ll need to use a third party survey software such as MicroSurvey FieldGenius, SurvCE/PC, Topcon Field Magnet etc. Or try some Android Apps like Mobile Topographer, MapIt GIS Pro, Tersus Nuwa, etc. OR use a online web converter.
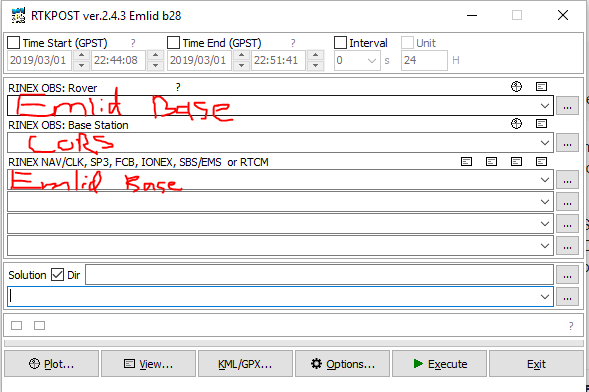
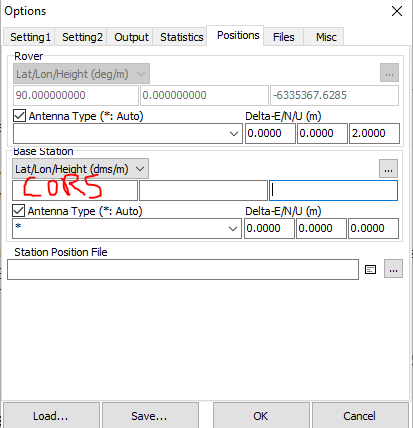
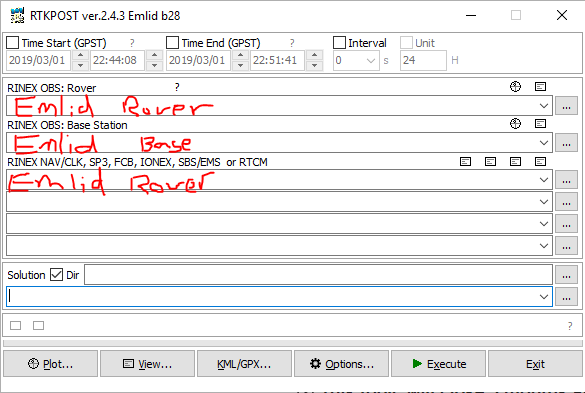
Then run into RTKPost with known coordinate of CORS base station.
After when have quality base position you can then run RTKPost again with Emlid Rover and Emlid base data providing the now corrected Emlid Base position (derived from CORS) into RTKPost
Try establishing and inputting base position prior to connecting the two devices. As in set up base before turning on rover. Establish base then power on rover and connect.