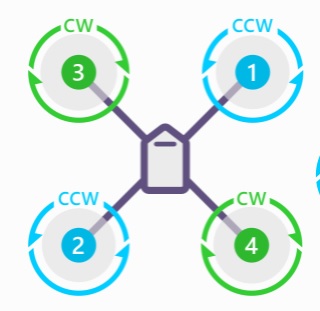
I’ve been trying for a few days now, the Quadcopter will not stabilize. It wobbles around and given enough throttle, it just flips over. Per motor check, motors are in correct order,
C (CW) A (CCW)
B (CCW) D (CW)
Correct props on corresponding motors.
I’ve gone through the Mandatory calibrations and setups. I’m new to Navio2 and Ardupilot, but not new to building and flying quadcopters. I feel I must be missing something with the configuration or setup. Any insight or advice would be greatly appreciated.
I can suggest going through the list in the ArduPilot guide describing how to troubleshoot a similar issue first. These steps can be really helpful in determining what went wrong.
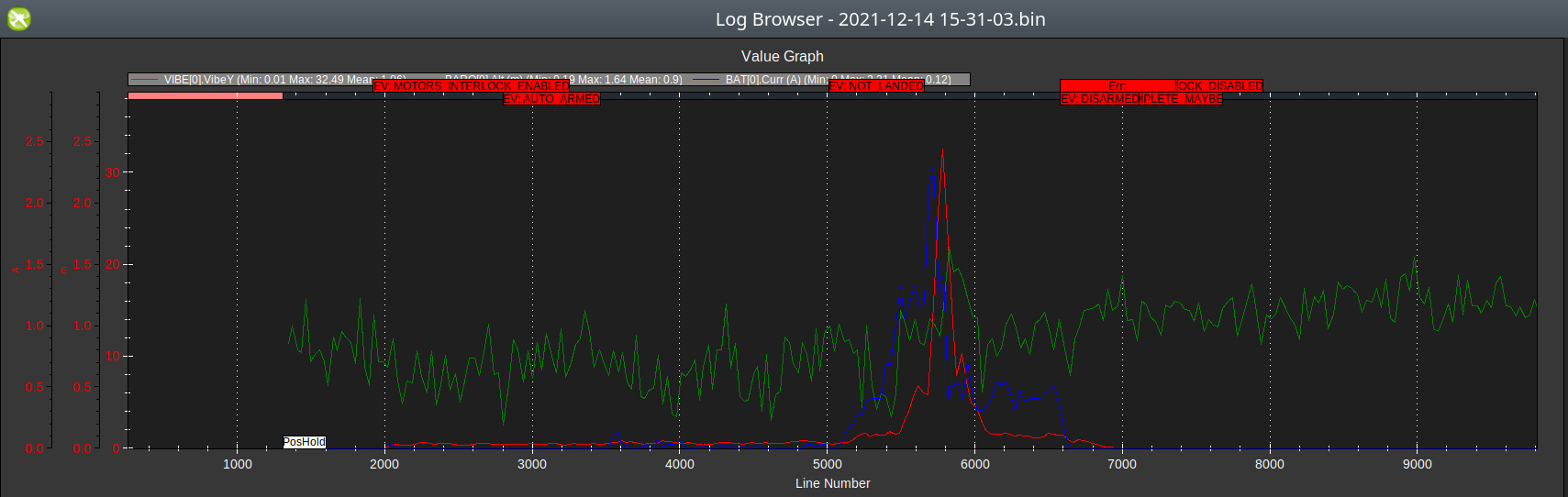
Thanks for giving the logs a look, thats interesting insight. I’m new to understanding this platform and curious about “x” vibration excesses vs. “y”. Any blogs or articles to help me understand that better?
As a general rule x and y vibrations should be below 30, however, z is often somewhat higher as linked to rate of climb and type of propeller being used + a few additional factors. (frame, motor-mount, power of motors,…).
There is also the possibility of filtering certain vibrations out - This is called notch filtering.
But needless to say, its much better fixing the actual cause than trying to just fix the symptom.
In below graph I’ve also included the current increase at time vibrations occurred which is clearly linked to vibrations increasing during take off.
Thank you VERY much for taking the time to walk me through that. I truly appreciate it. I’m on holiday right now, but when I get back home I’ll dig into getting my issues solved.
I essentially started over as I felt the Frame itself was the likely cause of much of the instability and vibration. I re-built using the T4 Quadcopter frame (on Thingiverse).
I still haven’t left the ground, but I feel as though I am getting results as I try to Tune it. It’s too windy right now to do anything further today.
The motors numbered 1-4 vs. lettered A-D. The letters correspond with the “Motor test” order, and the numbers correspond to the order for which motor gets plugged into the autopilot.