We don’t recommend just deleting photos because we don’t know which photos exactly don’t have matching time marks. For example, if there are some connection issues between camera and Reach, time marks could be lost in the middle of the survey. Also, time marks are recorded with better precision than standard image metadata has. That’s why Emlid Studio can’t match them.
Can you share the raw data? I’ll check how time marks look like there.
Emlid studio had 100% success in all 6 ppk flights i have done with the mettatec kit. Never missed one time mark or photo.
In other hand toposetter sometimes it reported fewer or more events than photos. This happened when i used some capture lag offsets i think.
So for me Emlid studio is more reliable.
As for the ppk kit maybe you should check the wiring?
sorry… can’t you just ignore the number of photos in the folder?, the photos will automatically be selected according to the data log to deal with the number of photos processed by the log data and different camera shots
How fast you triggering? Emlid should use a different method to tag and get rid of the need to have matching number of photos when issues like this arise. Check out GeoSetter maybe.
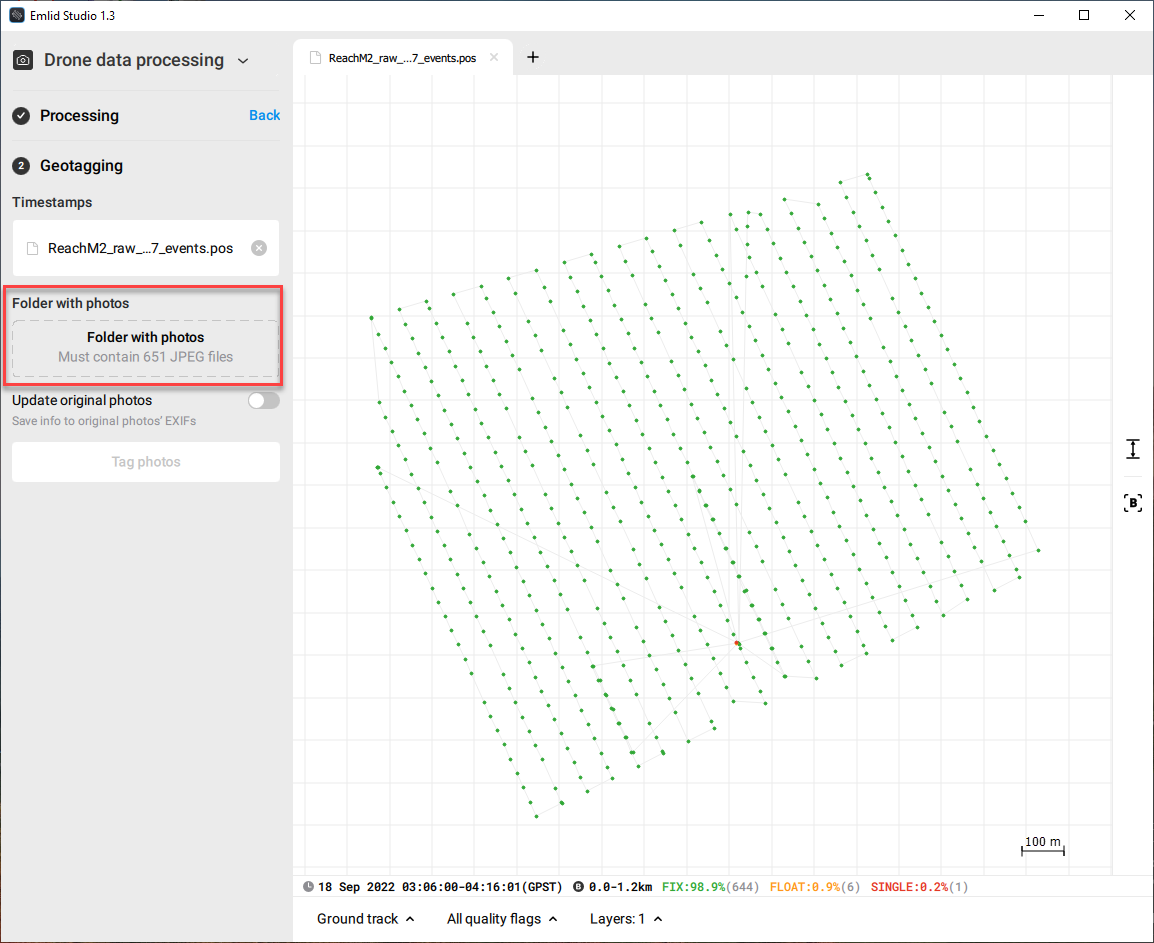
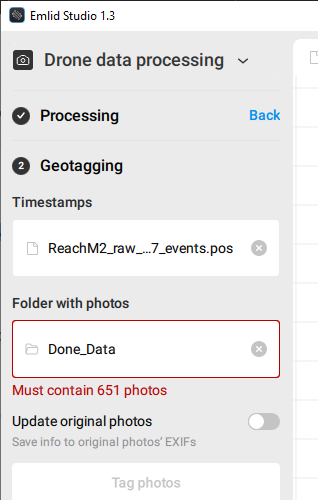
The main issue here is that time for some images wasn’t recorded. You have 651 time marks in the raw data log too, so it’s not about Emlid Studio.
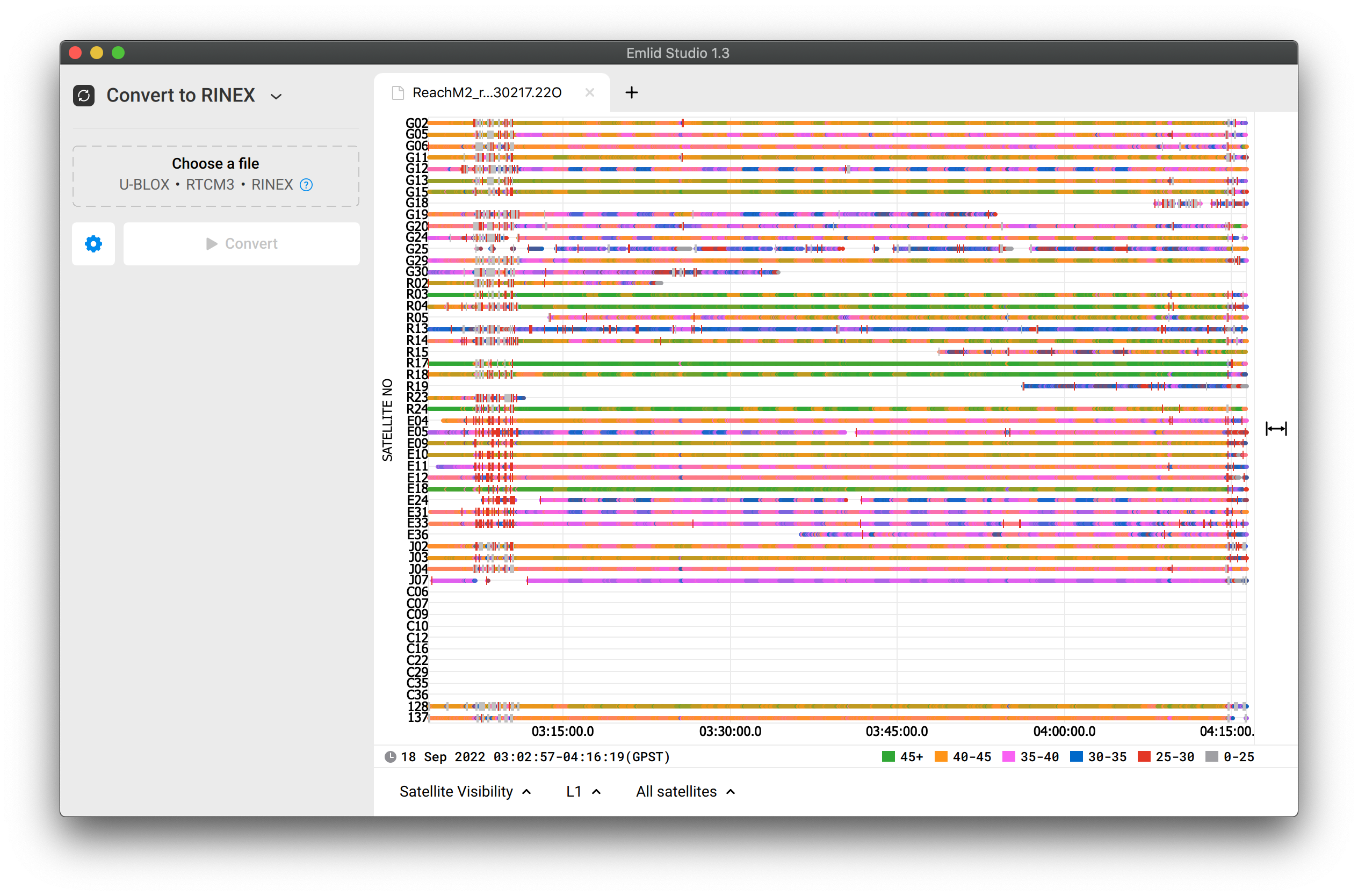
I can’t say the raw data is of very poor quality, but I’m confused with these SNR jumps. For example, if you look at G19 or G24 satellites, you can see how blue parts sharply change to pink ones:
It may happen because of noises produced by the drone.
Another argument for that is this strong disturbance in the beginning of the log. I suppose the drone was armed at that time, and some electronics started to affect the signals.
The noise is the most often reason for losing time marks. I understand you purchased the ready solution, but still, I’d consider changing it a little bit. For example, you can raise the antenna higher or isolate Reach itself with a foil. It should help decrease the effect of the noise producing by the drone.