This is a very interesting case and your extreme location and environment is likely causing you more problems up there than the many problems you are already dealing with.
In summary I think the additional GNSS issues impacting your results are:
- Arctic separation from GNSS orbits resulting in satellites lower on the horizon and overall more impacted by ionospheric effects.
- Mountainous terrain of your specific location impacting visibility of those low orbiting satellites.
- More significant ionospheric disturbances in the Arctic impacting the ability of the modelling to resolve ambiguities (“fix”).
Here is a plot that shows your location relative to the GNSS ground tracks. The GLONASS constellation extends the furthest to 64 degrees North around Iceland, but well short of your site at 74 degrees. This puts satellites generally further away and lower on the horizon.
Image courtesy of Trimbles Planning site https://www.gnssplanning.com/
Raising the elevation mask to 29 degrees and getting better results would normally indicate local obstructions impacting signals at least up to that angle. And indeed, viewing your survey site in Google Earth shows it surrounded by high mountains.
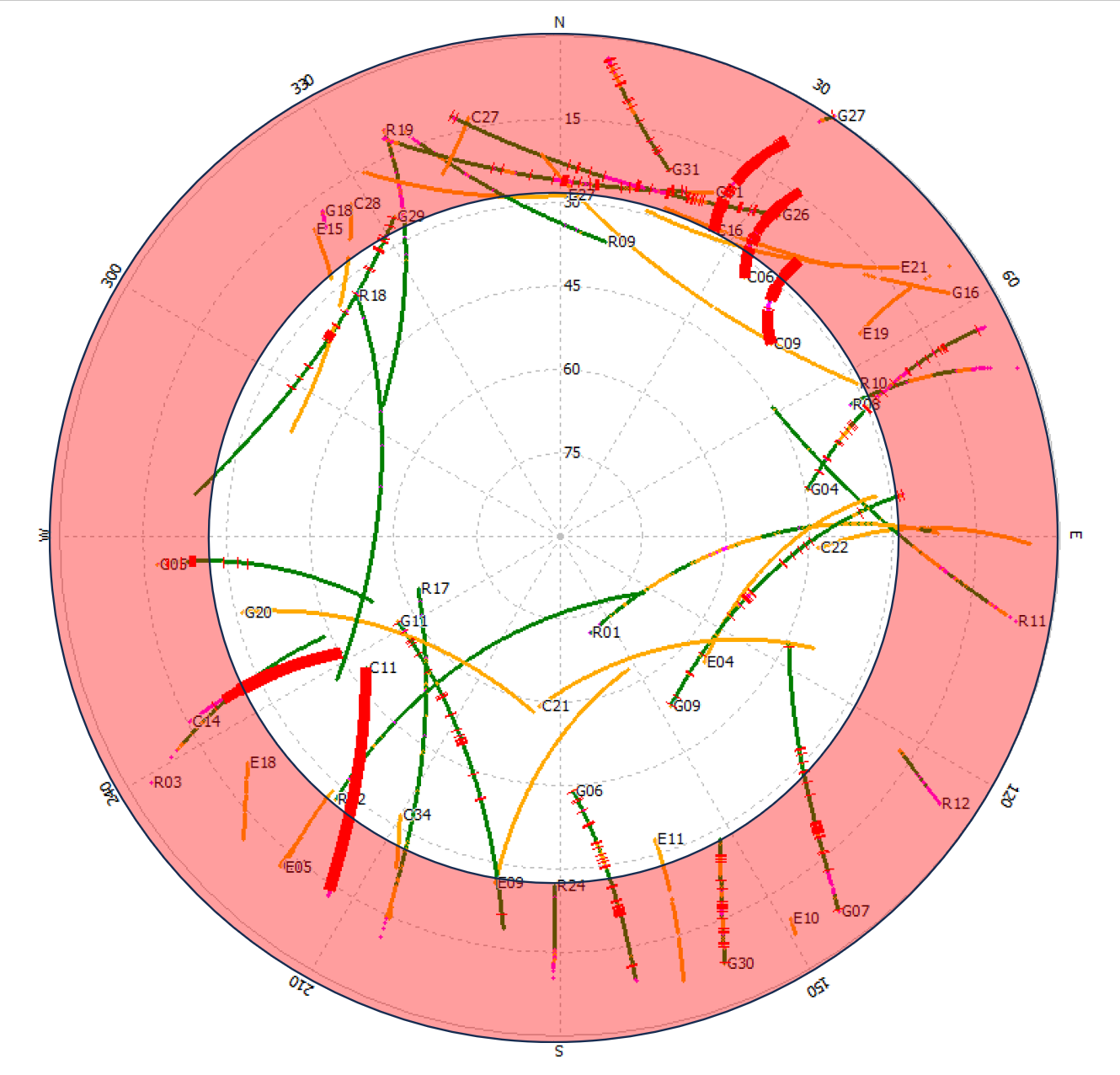
However, the net effect of both of the points above means that of the already limited visibility of satellites above the horizon, you have just had to tear away a large band of what was otherwise available. This plot of your rover file shows how most of the satellites are lower down toward the horizon, and the red area shows how much of that data below 29 degrees was removed from your processing. You can see that a large number of satellites didn’t have a chance to contribute to the solution.
In regard to the additional ionospheric issues there is some detailed information here:
Coordinates: A resource on positioning, navigation and beyond » Blog Archive » Challenges for Positioning and Navigation in the Arctic (mycoordinates.org)
And a relevant extract from that:
"This is often the case in the Arctic and the consequences for GNSS users with navigation grade receivers is a poor positioning performance with very large errors in the position solution.
For high accuracy positioning and navigation the use of ionospheric models is combined with the ionosphere free linear combinations of observations from the GNSS frequencies in order to minimize the ionospheric effect to a level where carrier phase ambiguity resolution is possible. Higher order ionospheric effects are, however, not handled by the linear combinations.
Second and third order residual errors of 10 cm or more will thus be present in the observations (Morton et al, 2009). In case of large TEC gradients it is difficult, sometimes impossible, to successfully resolve the ambiguities because of the large residual ionospheric effects."
What to do? Good question, maybe seek expert advice possibly from the authors above. The simple answer is that your best bet is probably less about processing, and as is normally the case, more about longer collection time. And in this case much more time and extending observations as long as humanly possible under the circumstances.
If I had those problem here it would be easier, I would be giving each point at least 30 minutes to an hour, maybe more. You want to give as many of those satellites as possible a chance to drift up into and through that clear space and be counted, and for as long as possible to give the processing algorithms a chance to resolve the ambiguities under those difficult ionospheric conditions.
However, you clearly don’t want either yourself or your equipment to freeze to death in those extreme conditions. And I can see the logistics of time, terrain and distance including the boat trip back to your base at GNSS base site 1.
Gutsy effort, all the best with your work. And I’ll stay here where it’s warmer.