



Mobile Topographer Pro can display/output in UTM. Likewise, setup a QField project in UTM.
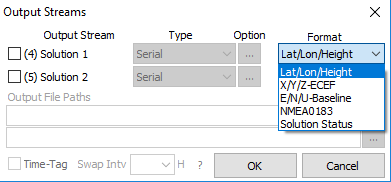
RTKNavi. Change the output stream.
Mobile Topographer Pro can display/output in UTM. Likewise, setup a QField project in UTM.
RTKNavi. Change the output stream.