



Hi,
We are a group working on our bachelor thesis. In short, our goal is to make a drone fly autonomously. But we’re not sure we’re calibrating the compass correctly.
Were using:
- Navio+
- GNSS antenna
- Raspberry pi3
- Mission Planner 1.3.41
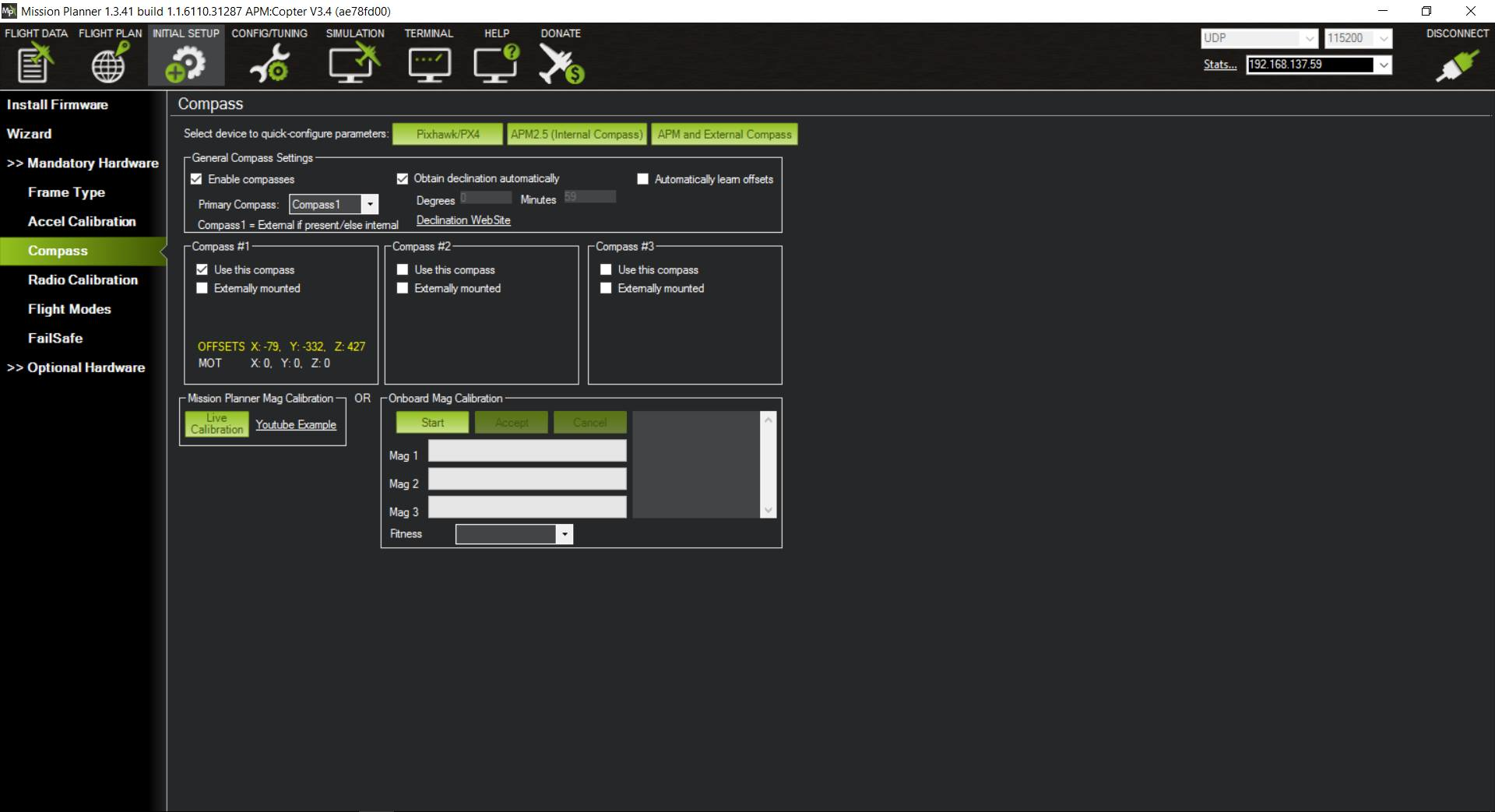
During calibration we get 0 compass error.
- What are the recommended compass offsets?
- And are those the right settings?
Any help would be appreciated 
Regards,
Kenneth
