



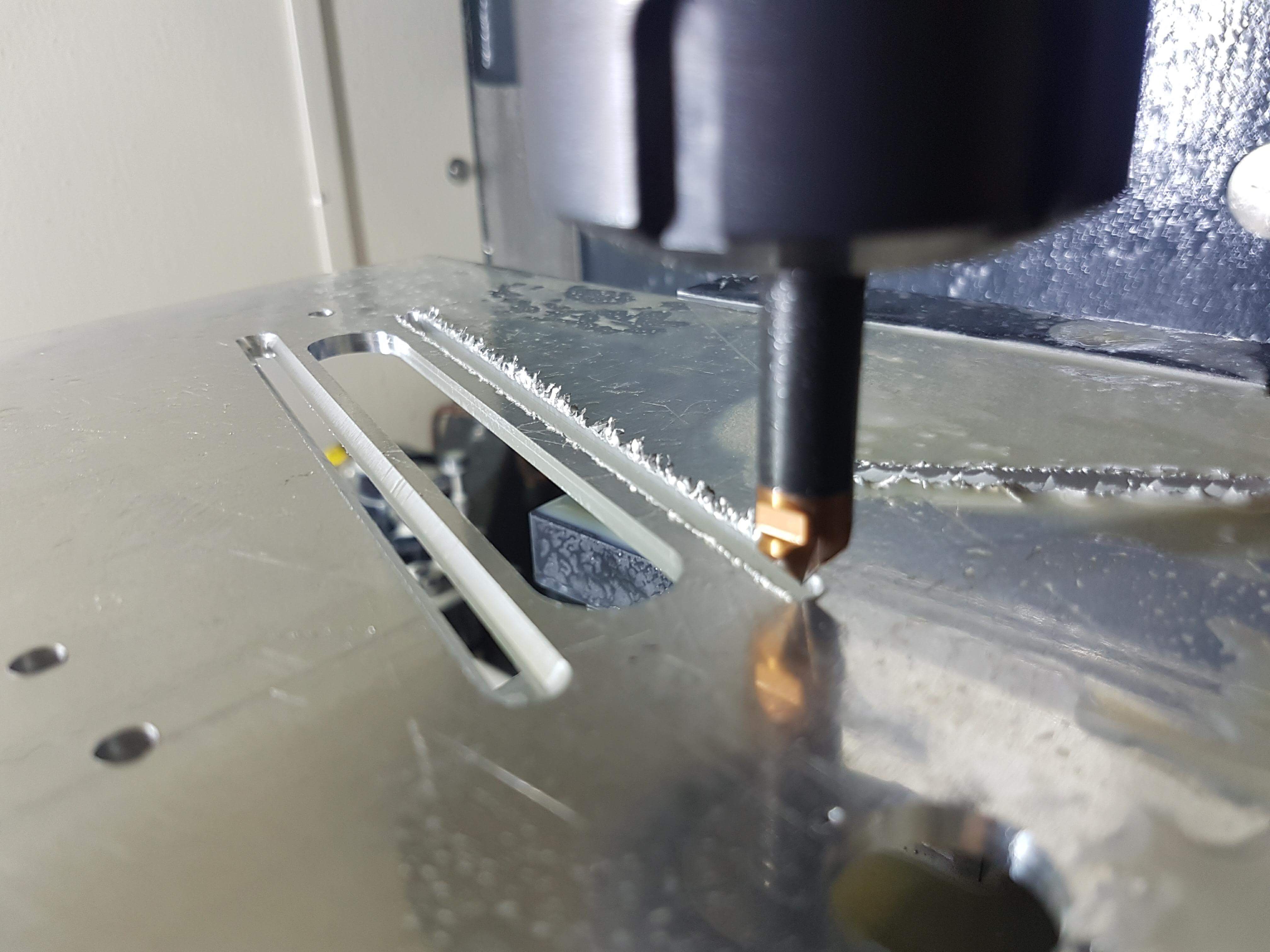
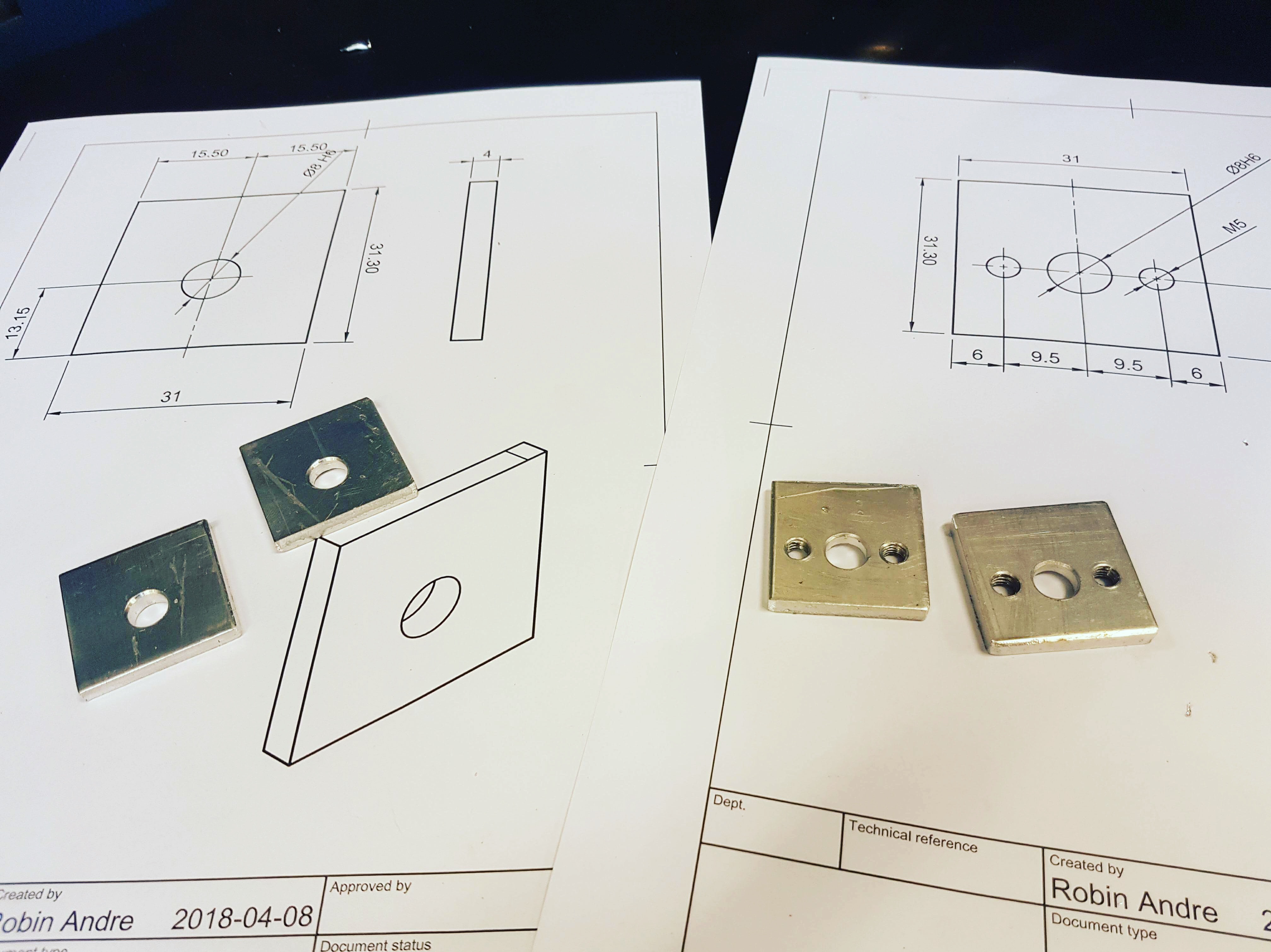
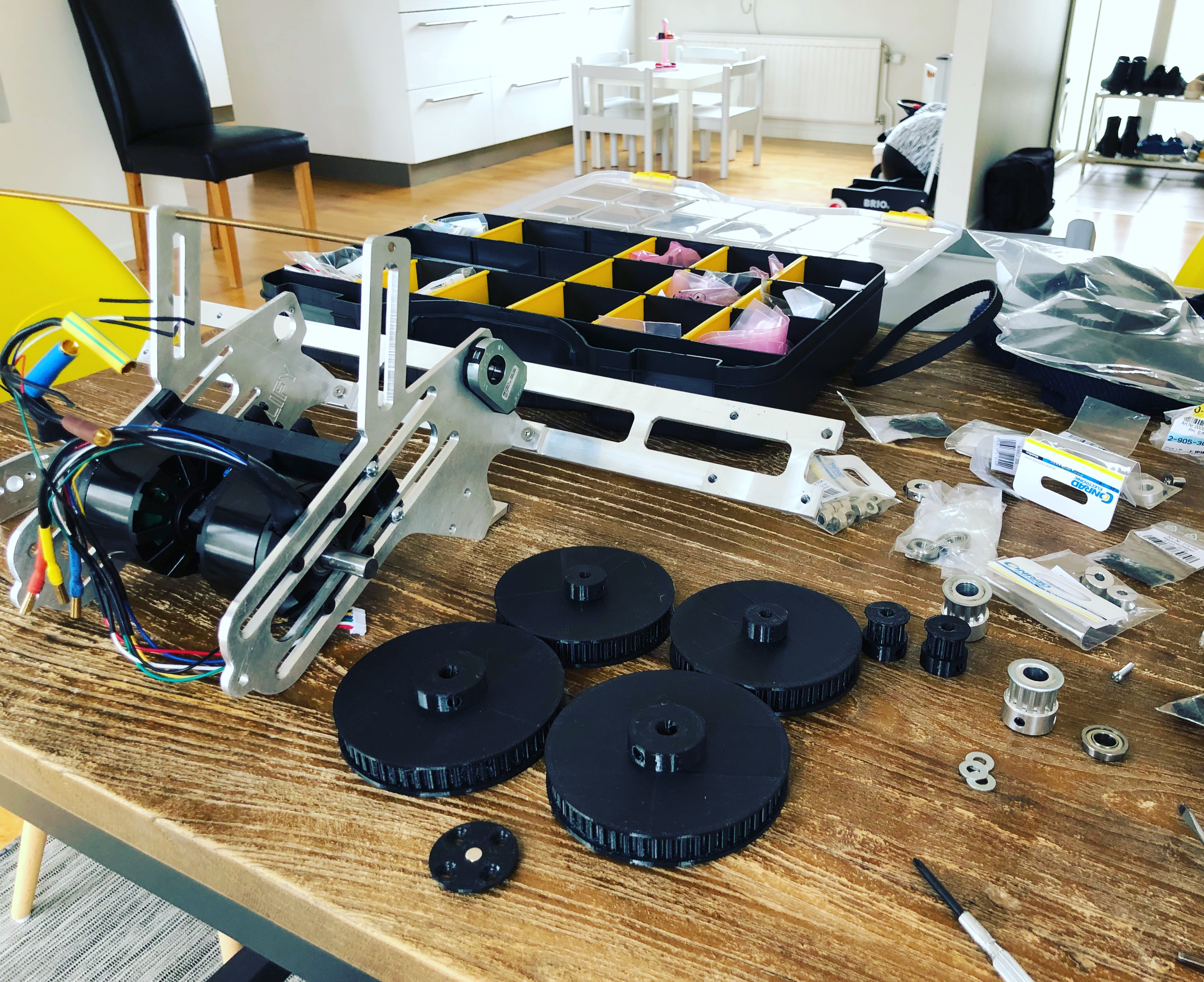
So yesterday, CNC milling of motor brackets was started.
The inside contour was finished. The outside contour is left.

2 Likes
So, I’m guessing that flat socket head capscrews (tapered/countersunk) are superior to socket-head capscrews (flat-bottom) for slotted mounting holes? Or is it just personal preference?
And don’t tell me that your CNC milling machine is also in your living room at home beside the Raise3D printer!
Also, I’m a little astonished as the speed of your progress. Keep it up!
2 Likes
Socket-head would be preferable, but because of the pulleys and others parts they take too much space so I need to use countersinks to avoid collision/grinding. 
In fact, a friend helps me with the CNC milling. I have no CNC machine;)
Thanks! I work maybe 1-2 hours every night when kid/wife are a sleep
2 Likes
Update to the build:
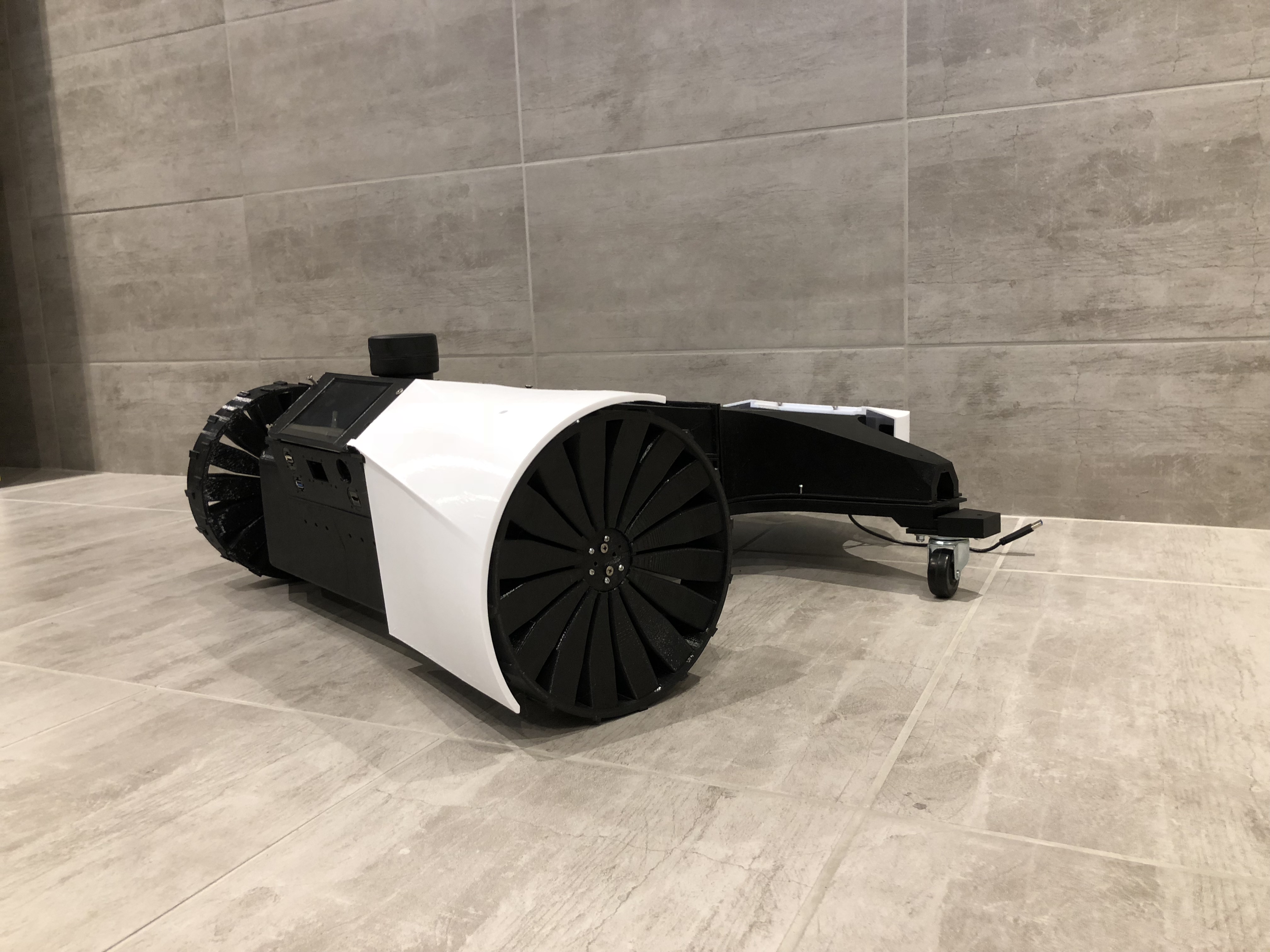
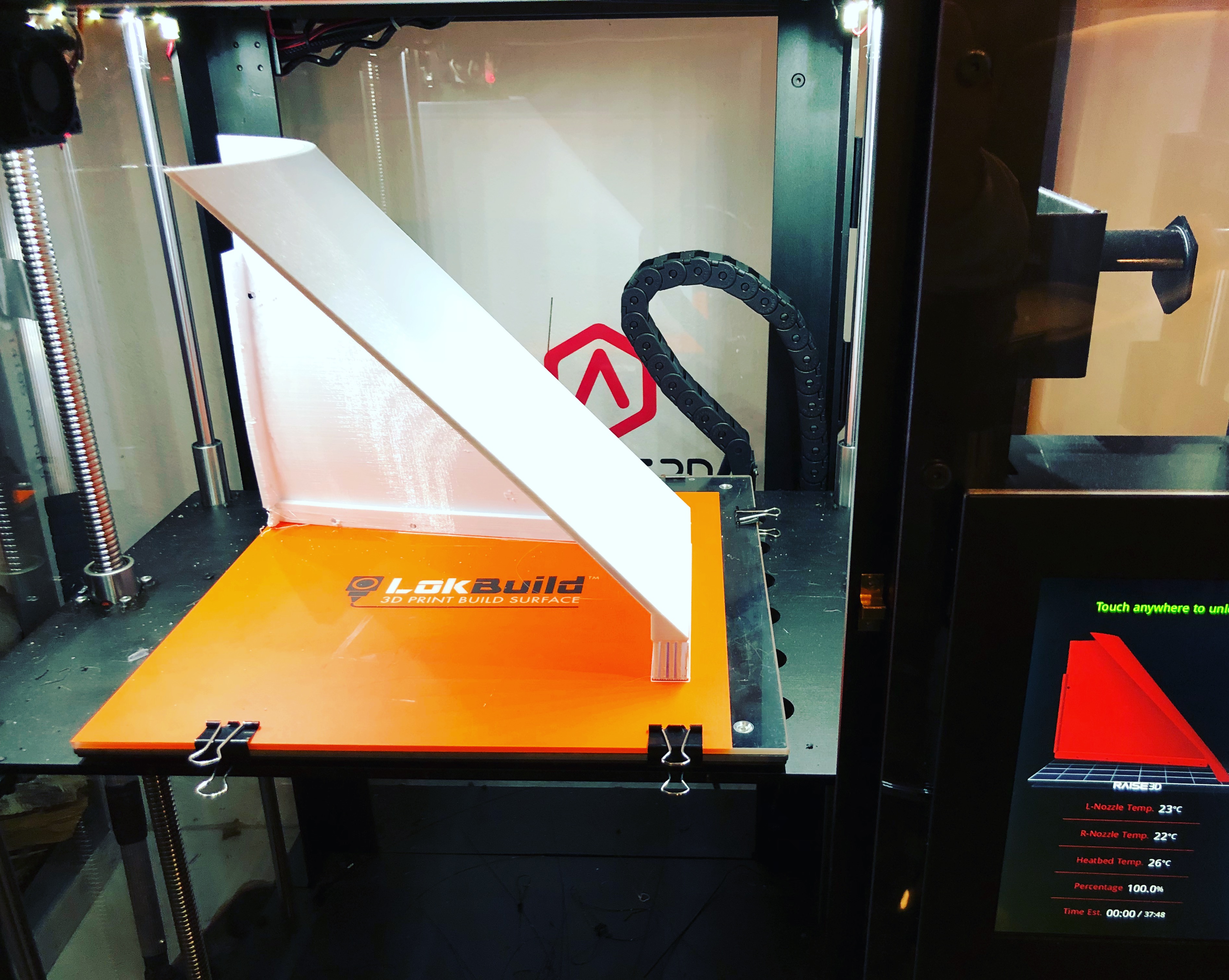
First big body cover printed. The part came out great. Running PrimaSelect PETG Solidwhite at 240C. This print was printed with 0.6mm nozzle instead of the original 0.4mm. layers looks nice and even! This part was printed at 2 shells at 10% infill and print time landed on around 15h.

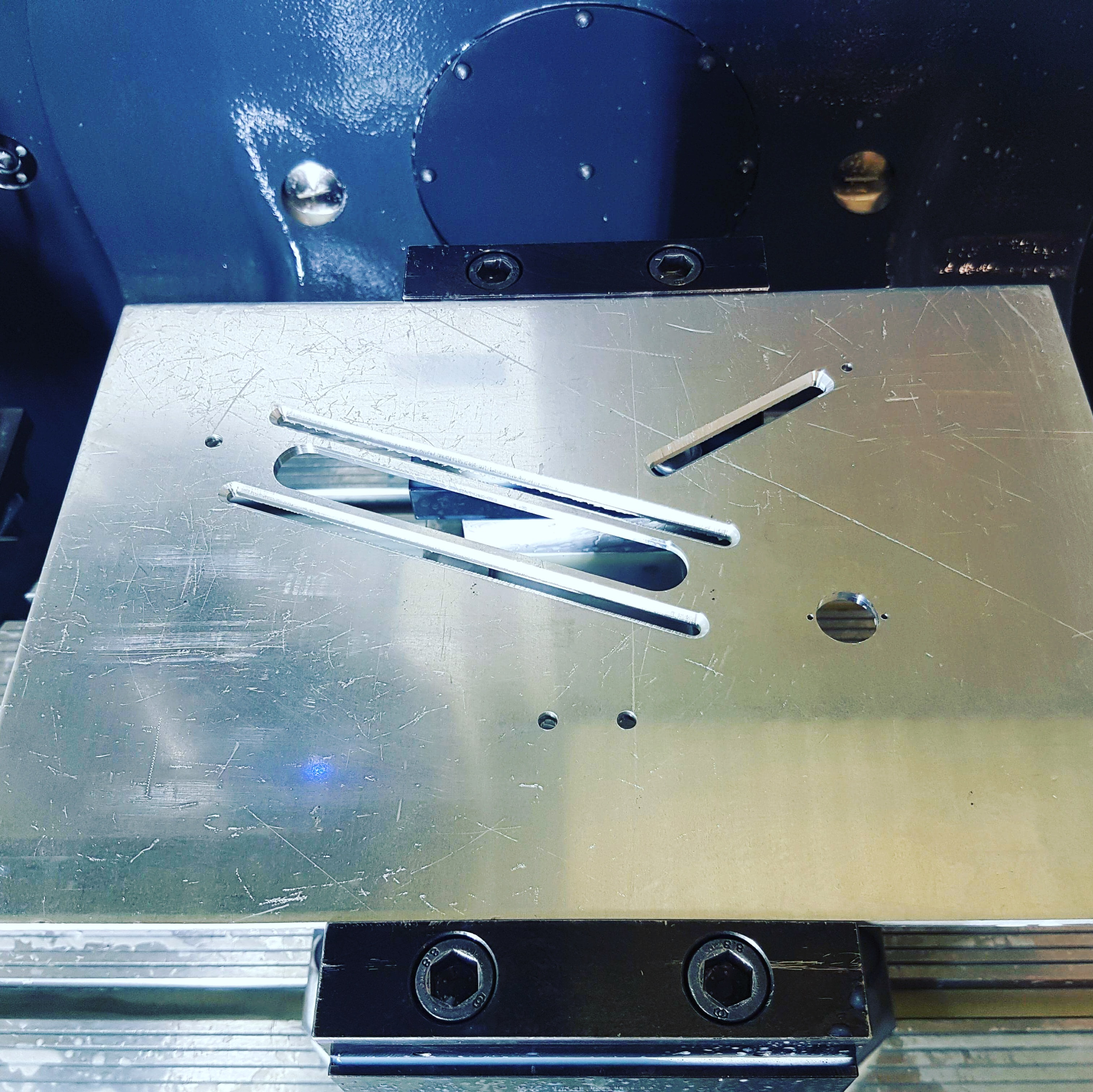
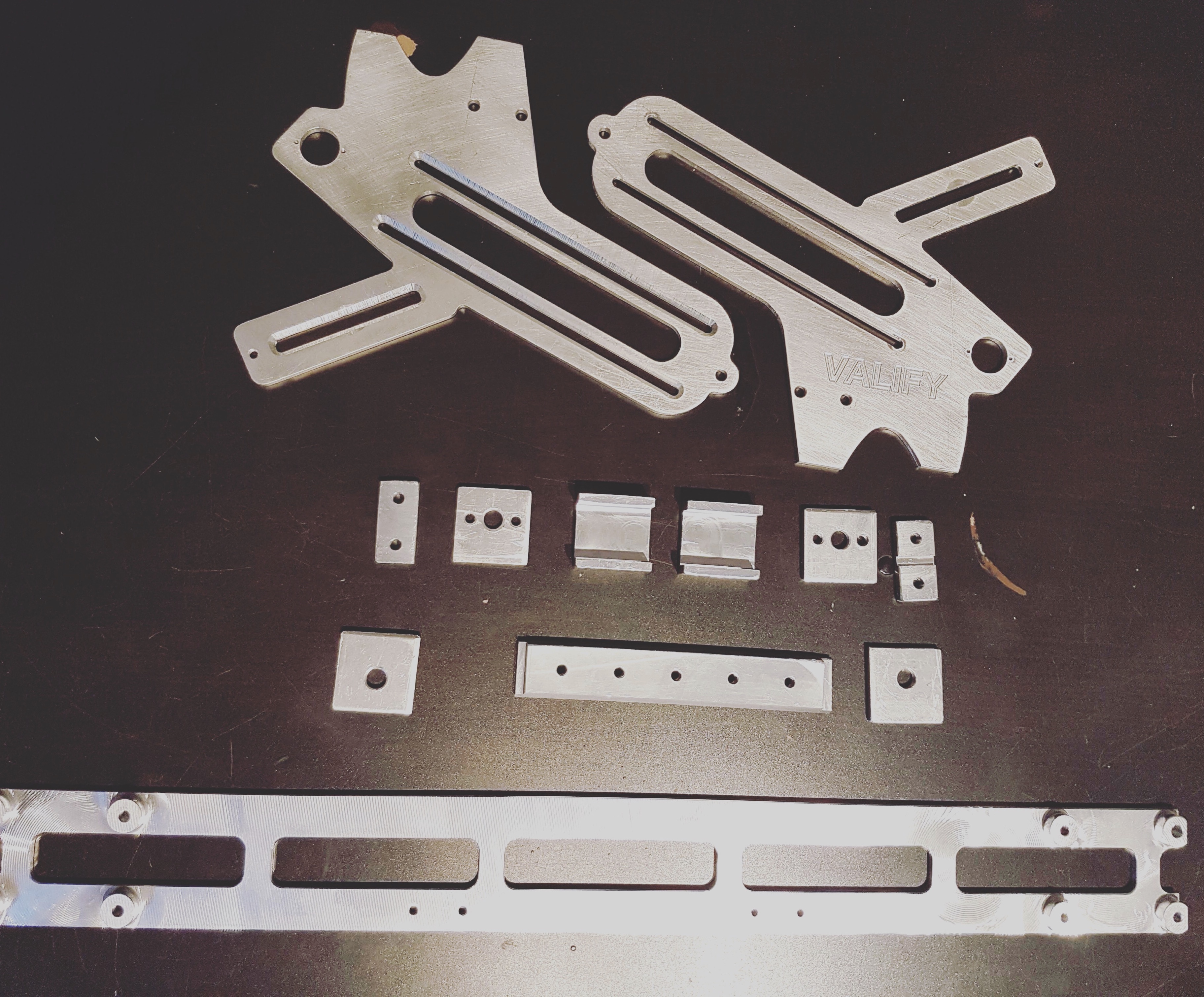
The motor brackets are ready and just some minor things left to be CNC milled. Then finally I can assemble the drive system


2 Likes
olala, Today all parts for the drive system is completed.
Some parts will be welded together and then the assembly will begin next week!
I have to admit that I am a little excited 
1 Like
I just uploaded a behind the scene step by step modeling Autodesk Fusion360 video on YouTube. See the birth of the robot from scratch.
1 Like
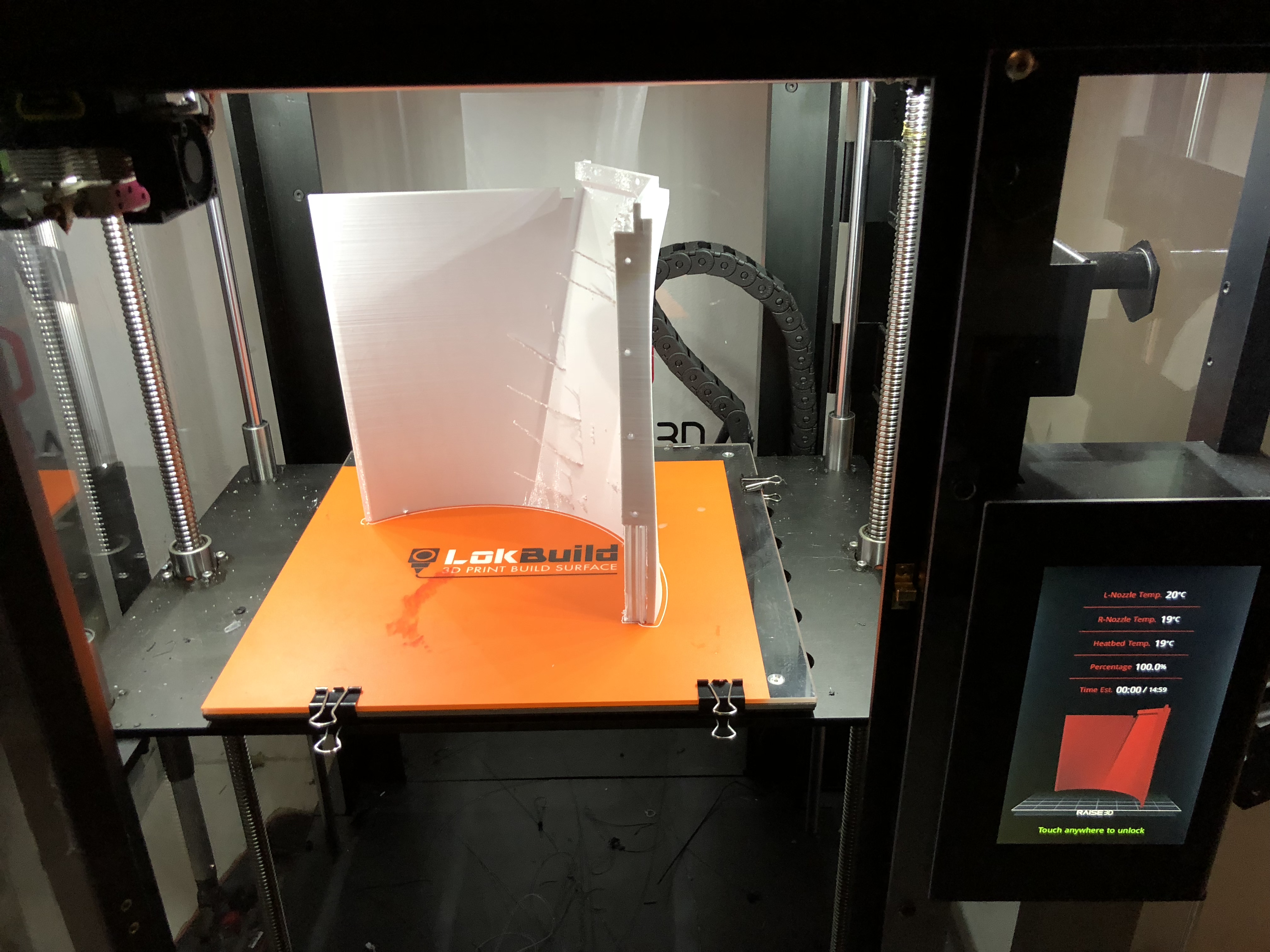
So today the rear wheel arch part 2 finished. 37 hours print that consumed around 450grams filament. I have to say that I was a bit nervous when printing this. 5mm thickness and around 250mm heigh, not much bed surface, but the raise3D managed to print it with success!
Test assembly of the rear wheel arch’s. Looking quite Good. Part 2 is a bit warped but I think it’s fixable when doing the final finishing of the covers.



2 Likes
Left wheel arch part 1/2 completed late last night!
Test assembly. The covers fits nicely! Not so many parts left to print! I need to order more filament!


1 Like
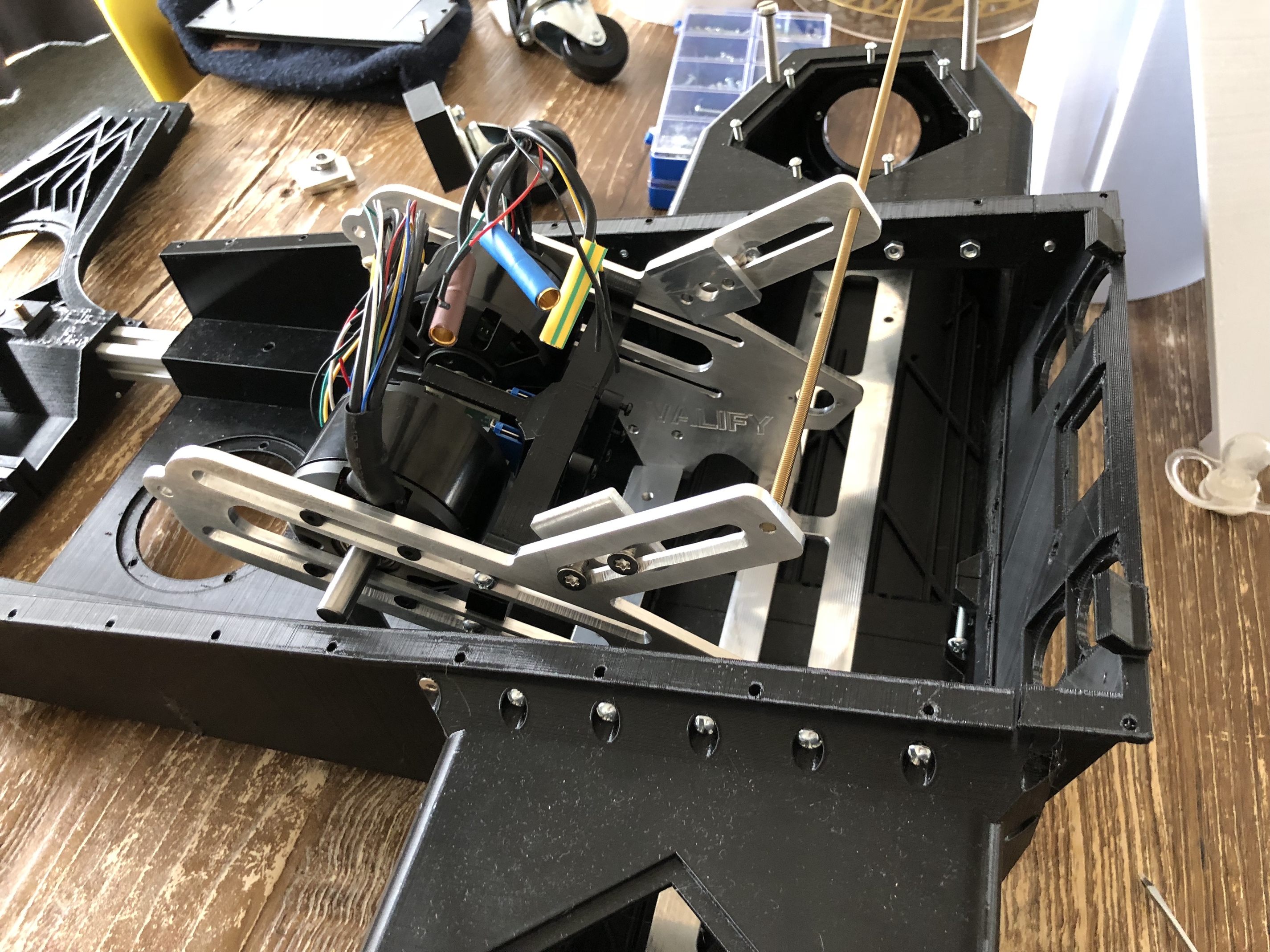
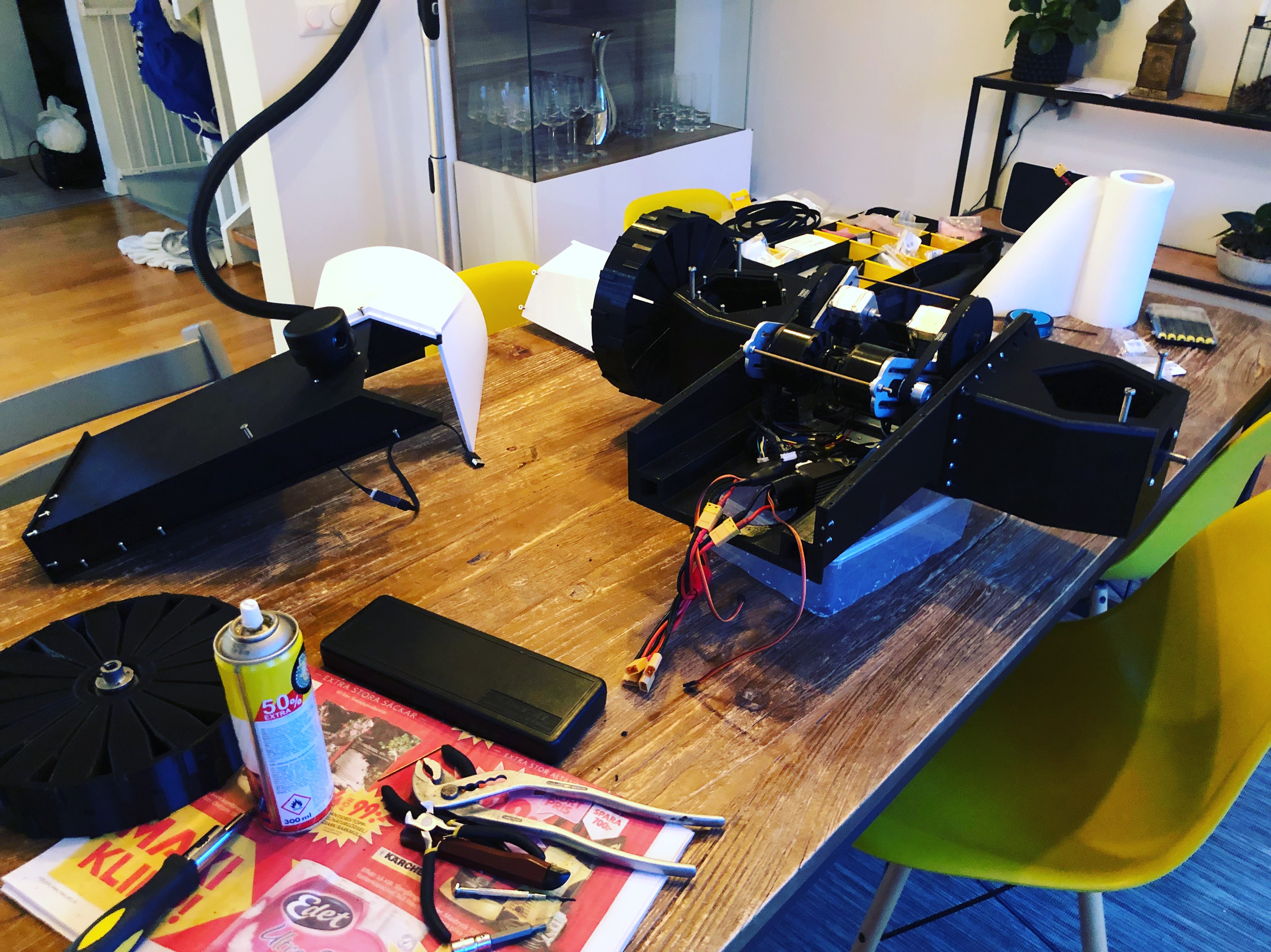
Drive system assembly test. Everything fits perfectly. Some welding left and we are good to go  #brushless #drivesystem #vesc #conrad #robotics #lawnmower #valify
#brushless #drivesystem #vesc #conrad #robotics #lawnmower #valify
3 Likes
So the last days I have been busy. All parts for the drive system was completed and tonight I finished the first test assembly of the drive system. Its a lot of parts for this part of the project and a lot of things need to be correct in order for a nice run. It took a bit of time to get it right and it was a lot of tinkering.



Here is quick video spinning the wheels:
2 Likes
Forgot to mention: Quick example of virtual fences (green outline) using only a 360 LiDAR and AMCL for localization. Virtual fences can be created around objects, trees or whatever. This is a first test setting up virtual fences in RVIZ, later on the fences can be setup when driving the robot around objects.
Testing the drive system. I need to remake the pulleys because they are slipping. Otherwise everything works fine!
Small test video
First test drive. Works good. One pulley is making annoying sounds.
4 Likes
@Valify, great project. Would love to replicate. Are you publishing instructions for the Jetson and controlling software side of things?
Regards,
Mohammad
@mohammad.bhuyan Thanks! The software is still ongoing. I don’t have a “completed solution” yet, but once I have I will share the stack on git.
project update:
The URDF is very time consuming but its coming along nicely. I have added all joints and are now working on to make them work as in reality.
The wheels are working great and the visualization in RVIZ presents the reality very well.
I have also started to work with the IMU joint and the ability to visualize the rotation of the robot (pitch, roll,yaw). To got this working I am using robot_localization pkg (sensor_fusion) Here I am fusing Odom and IMU to odometry/filtered. The visualization is still not very good for the IMU and will need some more love
2 Likes
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.