Trying get the Rover to Receive corrections from the Base using LoRa but having issues connecting when we exceed just a few meters.
We have tried:
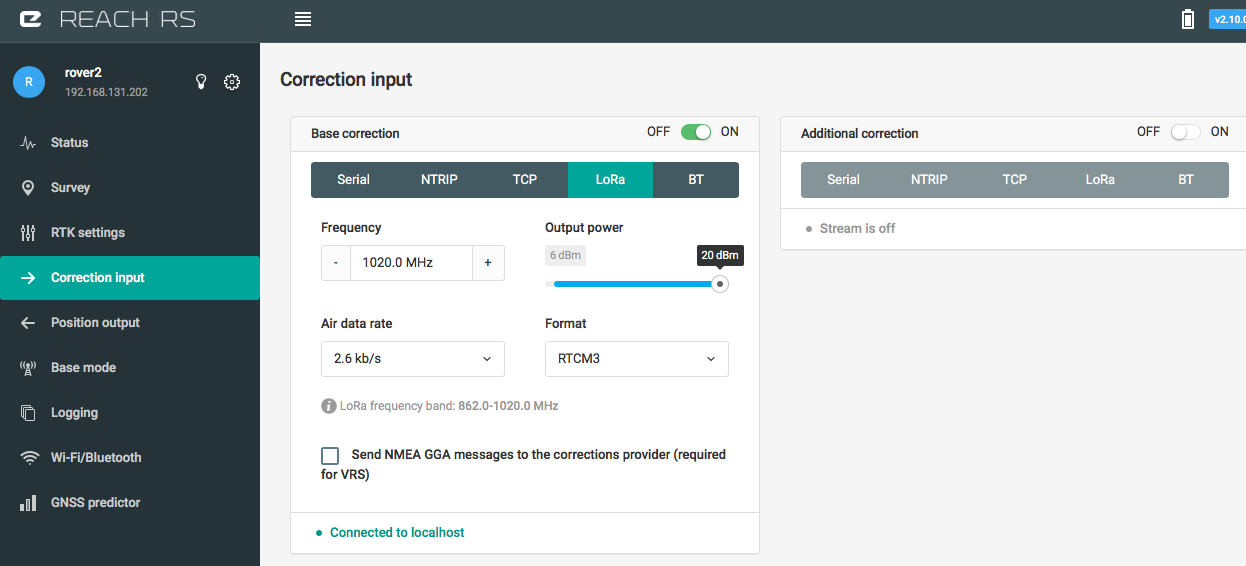
Keeping low air data rate and changing frequencies (but making sure frequency on rover and base match) We have stayed in the specified frequency range for LoRa (862MHz - 1020MHz).
Keeping same frequency and changing air data rate (while rover and base air data rate match).
Keeping everything same while changing output power from 6Dbm - 20dBm in 2 dBm increment.
We have read that the lower the air data rate, the higher the range. It is strange that LoRa is supposed to reach up to 16km but we cannot exceed 170m.
First day, we started at a position (say 10m) and would walk until they rover and base disconnected. We started at 1020MHz and went down to 960MHz with an air data rate of 2.6kb/s. The furthest we got was 164m at 970MHz.
Second day, we doubled our position (say approximately 300m-370m) and adjusted settings that I stated above until we (hopefully) would get a connection. Nothing happened.
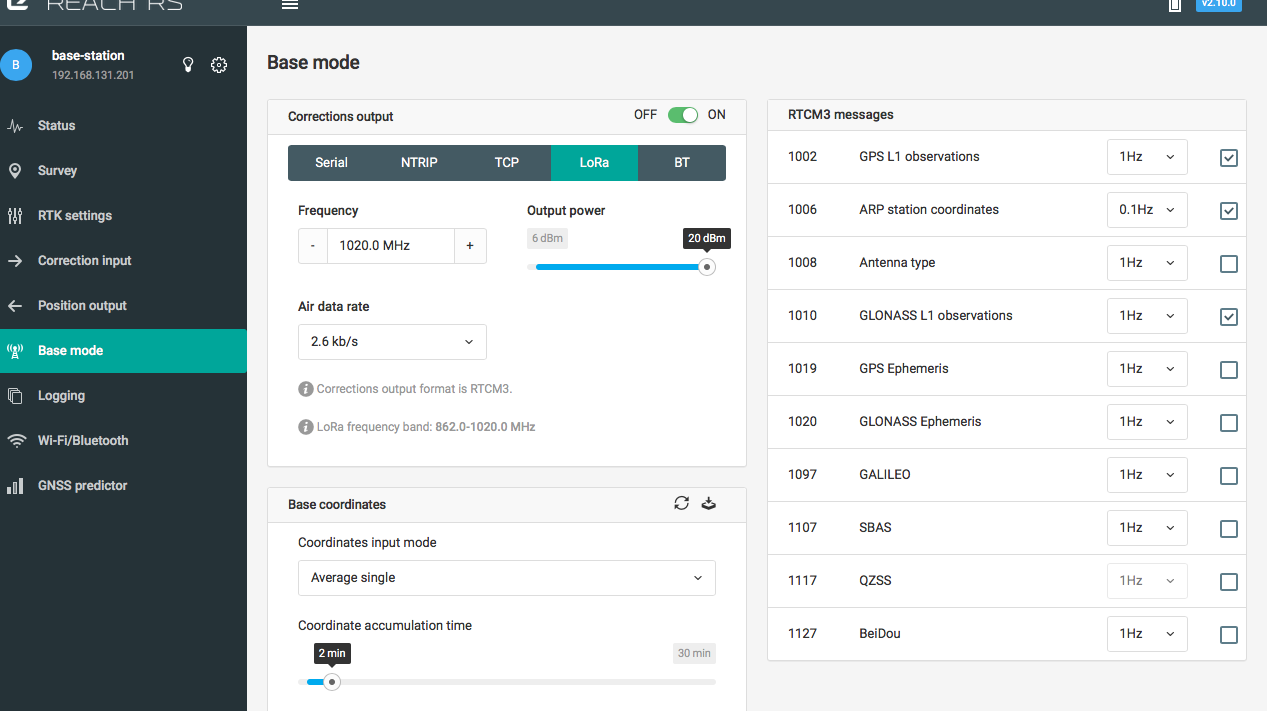
OK, and the frequency is 1Hz, 0.1Hz, 1Hz respectively? If so then good.
Set the radio speed at the highest frequency. See how much range you get. Then drop it down to the next lowest speed and see how much further you get. On the status page, watch that your age of differential time is not ramping up beyond a few of seconds. Find the slowest radio speed where the age of differential does not get too high, and that is where your maximum range should be.
There are users with many different levels of experience so this question might be too basic but are you 100% sure your correction data is going over your LoRa? It almost sounds like your correction data could be over wifi somehow. Of course, this is probably not the case but I just wanted to make sure. It would only happen if you had some things accidentally turned on. It wouldn’t be the first time it has happened. Just making sure.
This is a peculiar case. I will ask you to provide the following:
Two simple systems reports - for both base and rover. The setting on both Reach units might give some clue on what’s going on.
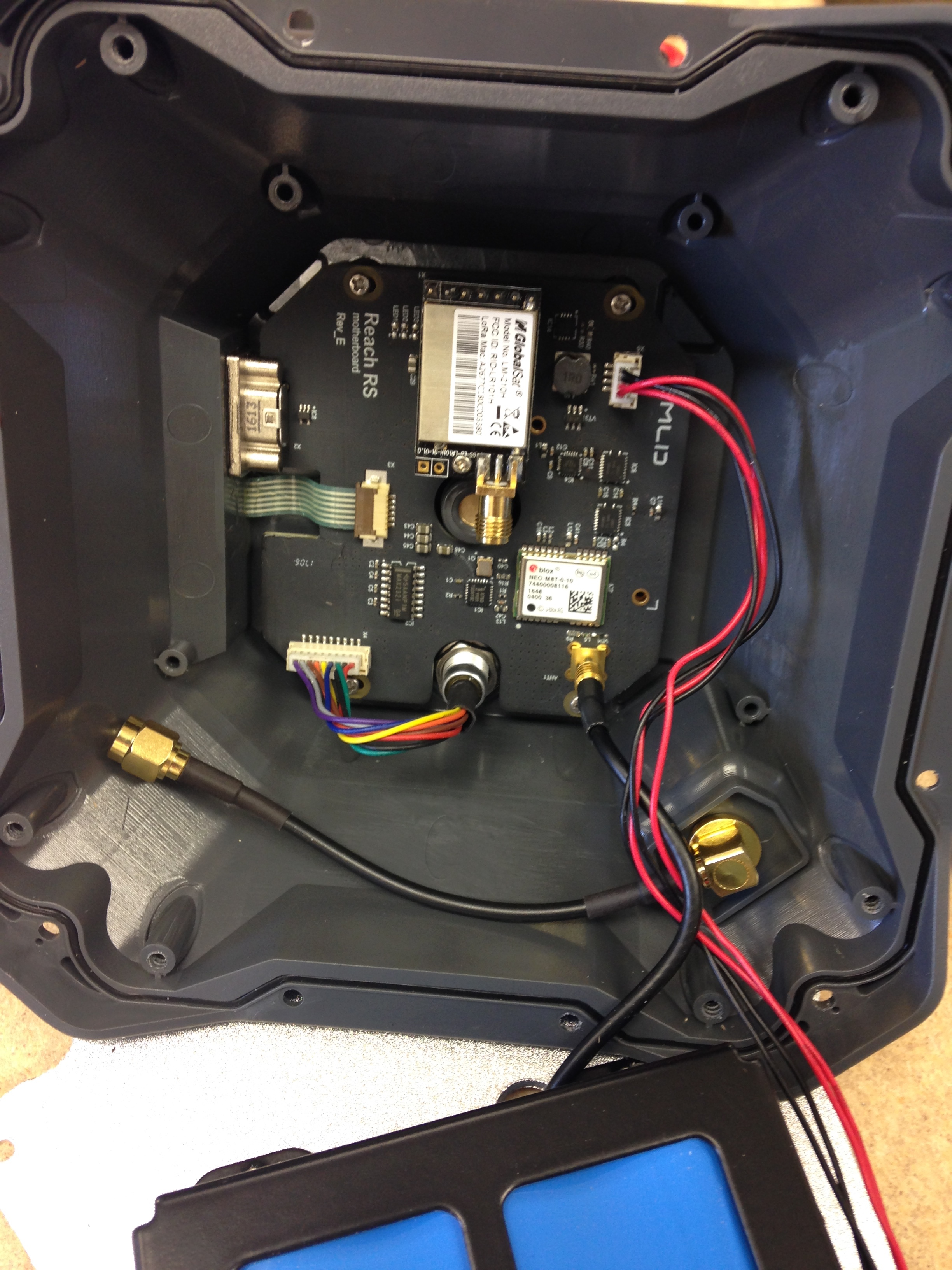
Some photos of your setup and the testing space. Don’t take this the wrong way, but do you have the LoRa antennas on?
Logs from the rover, if you have any. The position log contains age of differential info.
How exactly did you establish that the link was lost? What was the main sign?
Overall, I would recommend setting both output power and air rate to the max. The range limitations of the maximum air rate will not kick in until a very serious distance. Big air rate, however, allows for a more stable correction channel.
That is totally not too basic of a question! Thanks for asking!
What we are doing is taking the base and rover off the wifi network and turning their hotspots on and connecting our phones to that network so we can read the data…
Thanks. That sounds like your theory is right! As @egor.fedorov already mentioned, the two simple systems reports or some screen shots of your settings would help us help you!
As far as telling when the link was lost is when we look at the status of the rover and it loses the grey bars on the graph. From what we have read, the grey bars indicate that is connected to base unit.
The other requests you made I can take care of when I get back to office on Monday…
When we are getting our data from the Status graph, we are staying with in visibility of the base station. (Even though it shouldn’t matter using LoRa)
If there is any other information you want me to provide, please request.
Thank you.
We have not figured it out yet. About to test in an empty field to see if we are getting the same problems; if so, it will probably be hardware issue. All the settings are set correctly.
We will post solution as soon as we have one. (right after we jump up and down for joy of course)
One of our Reach RS units was messed up. We are guessing that the LoRa radio transceiver inside was the issue. We cut both of them on and used a tool that reads the frequency coming off an antenna. When we did this we got some weird numbers for the Base Reach RS unit. So we tried the LoRa radio on two other units and excluded the one that we got a weird reading for and the LoRa radio worked fine.
@treybr3 Wow, this is pretty bad. Very sorry about this situation. Could you please pm me a picture of the barcode on the bottom of that RS so that we can investigate?




 Just making sure.
Just making sure.