I am planning some Drone lidar (DJI350/L2) mapping work in a remote mountainous location with no established benchmarks and no network connection to support geohazard analysis.
My planned workflow is to:
Establish a base station and log while flying the LiDAR missions (log for 8 to 12 hrs). I’m flying in rugged terrain, so I will likely use an averaged base station (single) location to support RTK for the drone and improve terrain following while flying. However, the average base station location will not provide the absolute accuracy I need.
Use the base station log to generate a CSRS PPP location for the base station.
Use this log with the updated location to apply PPK corrections to the drone.
My question is, what is the best way to update the base station log with the updated location for the PPK correction? Is it simply a matter of editing the XYZ location in the RINEX header to the PPP location before using it in the PPK workflow for the drone data?
The two PPK systems I use (EmlidStudio & RedToolbox) give you the option of using different locations, either that from the log header, or a manually entered one. So, in general, I will manually enter the corrected values for the Static base location into the software before running the PPK processing. I’ve never edited the log file header/position as it’s not necessary.
There are a couple of valid options, the best is up to your own workflow preferences.
You could either edit the RINEX file, or choose to specify the actual base coordinates as opposed to using the Rinex header when doing processing.
I prefer to edit the RINEX file as it’s set and forget in a single place and consistent with all my other base files, both for my known points and CORS files, for any future us. I would annotate the file name to confirm it’s edited.
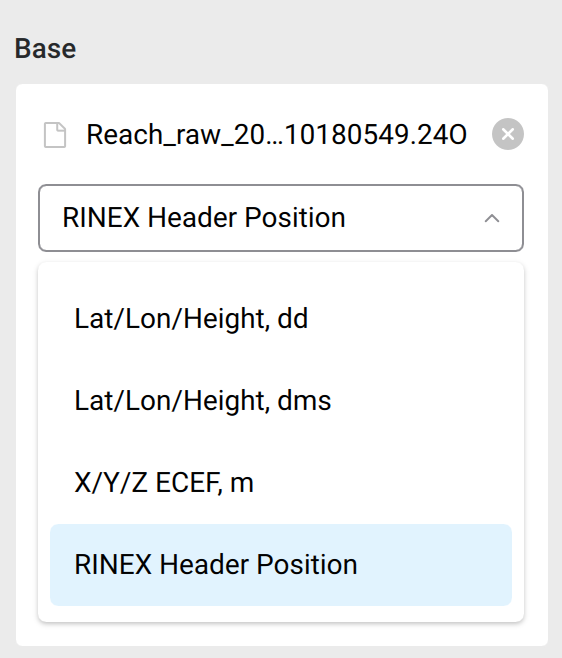
I can echo the words from Nick and Wombo. After you add the base file to Emlid Studio, a drop-down menu will let you choose the option to set the base position.
I’m processing DJI Zenmuse L2 data, which can only be processed in DJI Terra, and the drone’s RINEX data is in a propiatary format - i.e., there is no *.**O or .obs file associated with the data. As a result the Emlid Studio workflow won’t work. DJI provides a workflow for dealing with this however that involves overwriting one of the propiatary files (.rtb)) with the Emlid stations *.**O file.
To update the RINEX header I would simply replace:
LN 10: -2212188.9223 -3412823.0197 4897006.5847 APPROX POSITION XYZ
With the PPP solution in Cartesian Coordinates? And update the antenna height (LN11) to 0.
Yes, you can overwrite the cartesian coordinates with the ones from the PPP solution. Regarding the antenna height, did you specify it during the logging configuration? If so, you can leave that value in the RINEX header.
I’m not sure if you mean for photogrammetry or for LiDAR processing in Terra. For the photogrammetry I’ve been following the same as Nick and use RedToolbox or since the Emlid studio upgrade now writes exif, I have used it. For the LiDAR processing in Terra there is a base station centre point setting which allows you to update the base station with the PPP coordinates, it is just below the import folders.