Ehi guys (and obviusly milady),
here is Marco from Modena Italy, great city in the motor valley where you can drimk good wine, eat italian porn food, and look fast cars like Ferrari, Maserati, Pagani, Lamborghini…
In this days of #stayathome for COVID i have started to build a drone with my raspi 3B + and Navio2.
Construction and planning are proceeding without major problems but i have some curiosities that I would like to bring back to you for more information.
First… When i connect the raspberry and Navio2 to Arduplanner, software give me a message that 4.0.3 firmware is available.
I saw that with ardupilot you can connect the flight controller to the PC via USB cable and install the firmware through a COM connection.
Is this update necessary also for Navio2? If the answer is YES, how can I proceed with the update since I get nothing from the terminal on raspberry with the classic command SUDO APT-GET UPDATE && SUDO APT-GET DIST-UPGRADE?
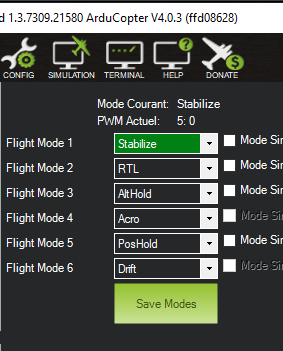
Second… Are the flight modes set on Arduplanner and saved already automatically written on Navio2? I have also read the guides on Ardupilot but I would also like to have a concrete answer.
Third … I have calibrated the accelerometer without problems or without error messages. I noticed however that the Arduplanner gyroscope when I point the front of the drone downwards the gyroscope goes upwards and vice versa. Do you have any clarification about it? The calibration of the controls is also perfect.
That’s all folks
Stay safety. Stay at home.