



Dear All,
I’m posting here because i’ve been investigating for days trying to fix GPS UNHEALTHY problem.
My Hdop is good 0,75 i can get 15 satellites,
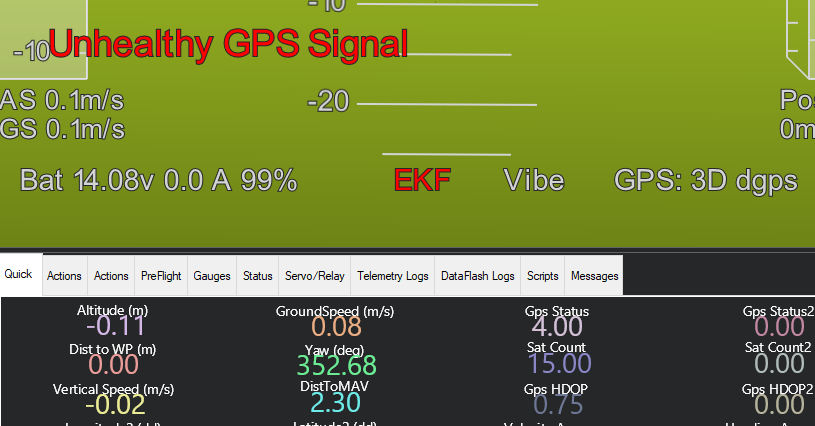
I’m afraid that the problem comes from a communication issue as the message are displayed as:
18/09/2020 12:46:36 : PreArm: Need 3D Fix
18/09/2020 12:46:25 : GPS 1: detected as u-blox at 38400 baud
18/09/2020 12:46:16 : GPS 1: detected as u-blox at 460800 baud
18/09/2020 12:46:11 : GPS 1: detected as u-blox at 230400 baud
18/09/2020 12:46:06 : PreArm: Need 3D Fix
18/09/2020 12:45:57 : GPS 1: detected as u-blox at 57600 baud
18/09/2020 12:45:49 : GPS 1: detected as u-blox at 115200 baud
18/09/2020 12:45:40 : GPS 1: detected as u-blox at 57600 baud
18/09/2020 12:45:36 : PreArm: Need 3D Fix
18/09/2020 12:45:28 : GPS 1: detected as u-blox at 230400 baud
18/09/2020 12:45:22 : GPS 1: detected as u-blox at 38400 baud
18/09/2020 12:45:15 : GPS 1: detected as u-blox at 115200 baud
18/09/2020 12:45:08 : GPS 1: detected as u-blox at 460800 baud
18/09/2020 12:45:06 : PreArm: Need 3D Fix
18/09/2020 12:45:04 : GPS 1: detected as u-blox at 230400 baud
18/09/2020 12:44:59 : GPS 1: detected as u-blox at 57600 baud
18/09/2020 12:44:55 : GPS 1: detected as u-blox at 38400 baud
18/09/2020 12:44:44 : GPS 1: detected as u-blox at 230400 baud
18/09/2020 12:44:36 : PreArm: Need 3D Fix
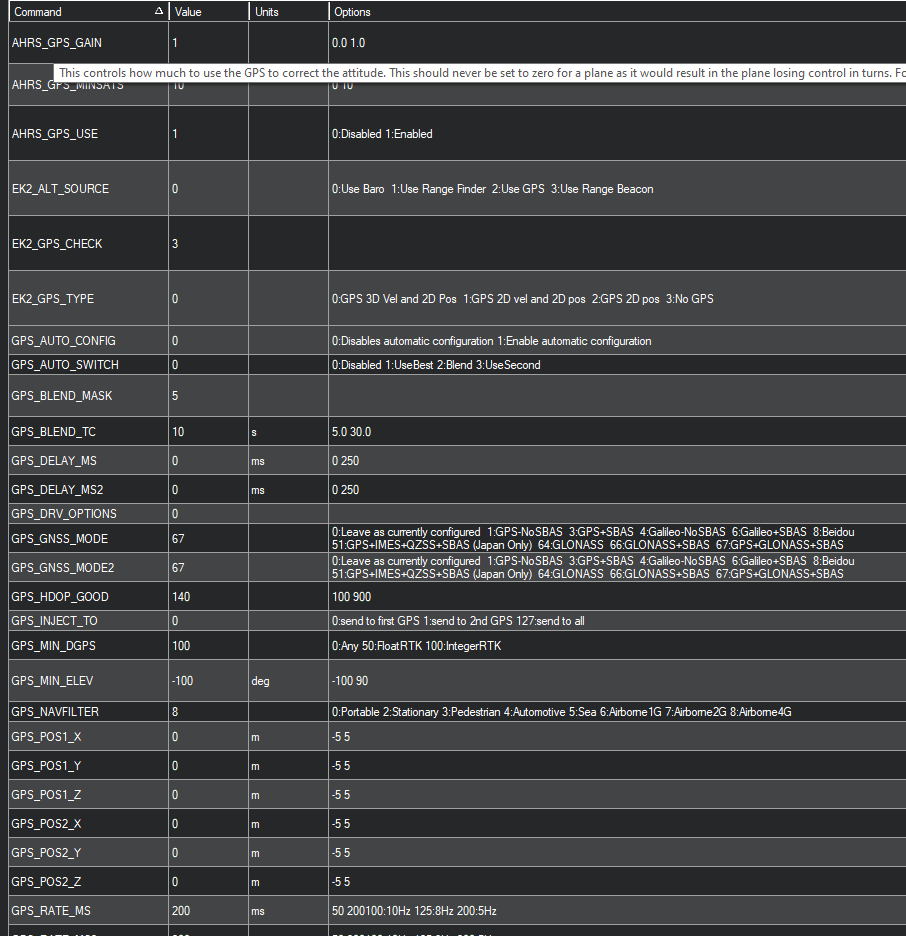
i reduced the speed to 5 Hz (200ms in GPS_RATE_MS) less messages but still GPS UNHEALTHY:
(after restarting ardupilot)
18/09/2020 12:55:17 : PreArm: Need 3D Fix
18/09/2020 12:54:47 : PreArm: Need 3D Fix
18/09/2020 12:54:43 : EKF2 IMU0 origin set
18/09/2020 12:54:35 : EKF2 IMU0 tilt alignment complete
18/09/2020 12:54:32 : GPS 1: detected as u-blox at 115200 baud
18/09/2020 12:54:31 : Barometer 1 calibration complete
18/09/2020 12:54:31 : Initialising APM
18/09/2020 12:54:30 : Calibrating barometer
Attached the u-blox Diag :
diagnostic.zip (1.8 KB)
my ardupilot parameters are as follow:
I tried to disable the GPS to use alternative one on serial, but seems that the internal U_blox always talk, then evry mode using GPS is not allowed…
If someone knows about this issue ?
I’m using a raspberry Pi 2 (might be not fast enough ?)