I’m using an RS2 base/rover combo with corrections over LORA. The project today involved surveying a significant distance from the base which meant corrections would be lost. At the point where we could not maintain FIX solution I switched the rover correction input to off assuming that I could simply record points in Emlid Flow (FIX only set to off) and then post process in Emlid Studio (v1.6). When processing in Studio I obtain FIX solution for approximately half the project but it changes to FLOAT at the point where we lost LORA and turned rover correction input to ‘off’. The project had a clear sky throughout the survey.
This was very unexpected and frustrating. Can anyone suggest any reason why this would be the case, particularly for such a dramatic loss of FIX at the point when I switched LORA off (to me this would not have affected anything).
What were your observation times for the non-lora points ?
Time on station and lengths of baselines are critical in static processing. If you didn’t have enough observed time for each point, you’ll only obtain a float solution.
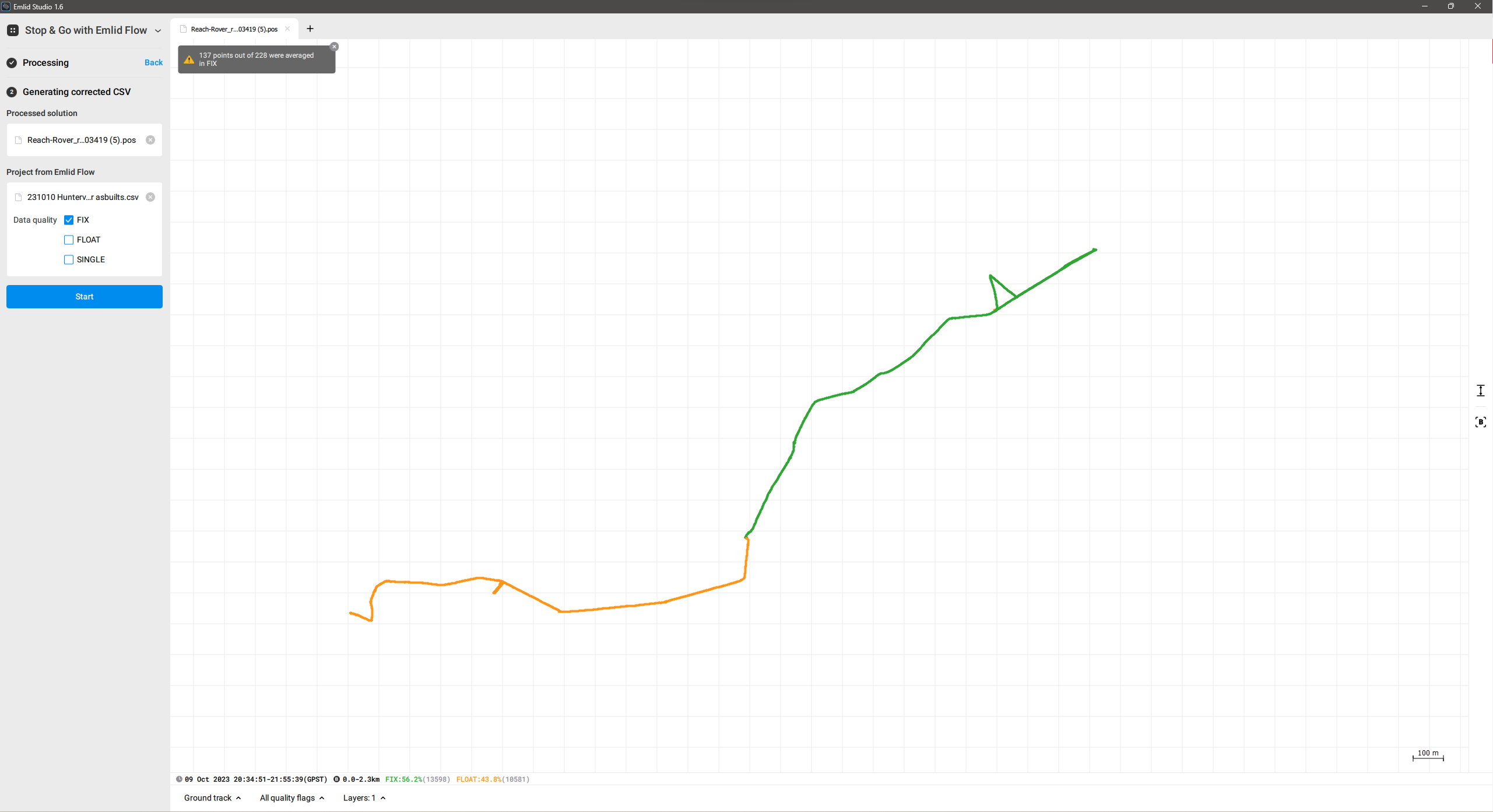
Thanks for replying Bryan. 5 seconds was the observation length. This isn’t the main issue though, since the LOG files were giving FIX solutions even before adding the CSV file containing the surveyed points. If you have a look at the plot you can clearly see that the ground track records where I was walking and it was giving FIX solutions even as I was walking along and not stationary… All of a sudden it cannot obtain FIX and can only achieve FLOAT…
I’d occupy the static points a little longer or store multiple points for the one point you are observing.
5 secs is a little short on time. I usually use at least 2-3 minutes minimum if it’s static and the baselines are < 1000 meters. Even for baselines in this range with fixed solutions, I’ll still observe at least 2 minutes or get multiple points observations.
My attitude is to take time and get the proper amount of data on a project. I despise going back on a project due to lack of data.
Turning the correction input off shouldn’t cause any issues as we usually just require collecting the points in Single for Stop and Go.
Could you please send us the data logs from the base and the rover and the CSV file from Emlid Flow? I need to look into them to check what could be the reason for this. You can send it to us via email: support@emlid.com. Thanks!