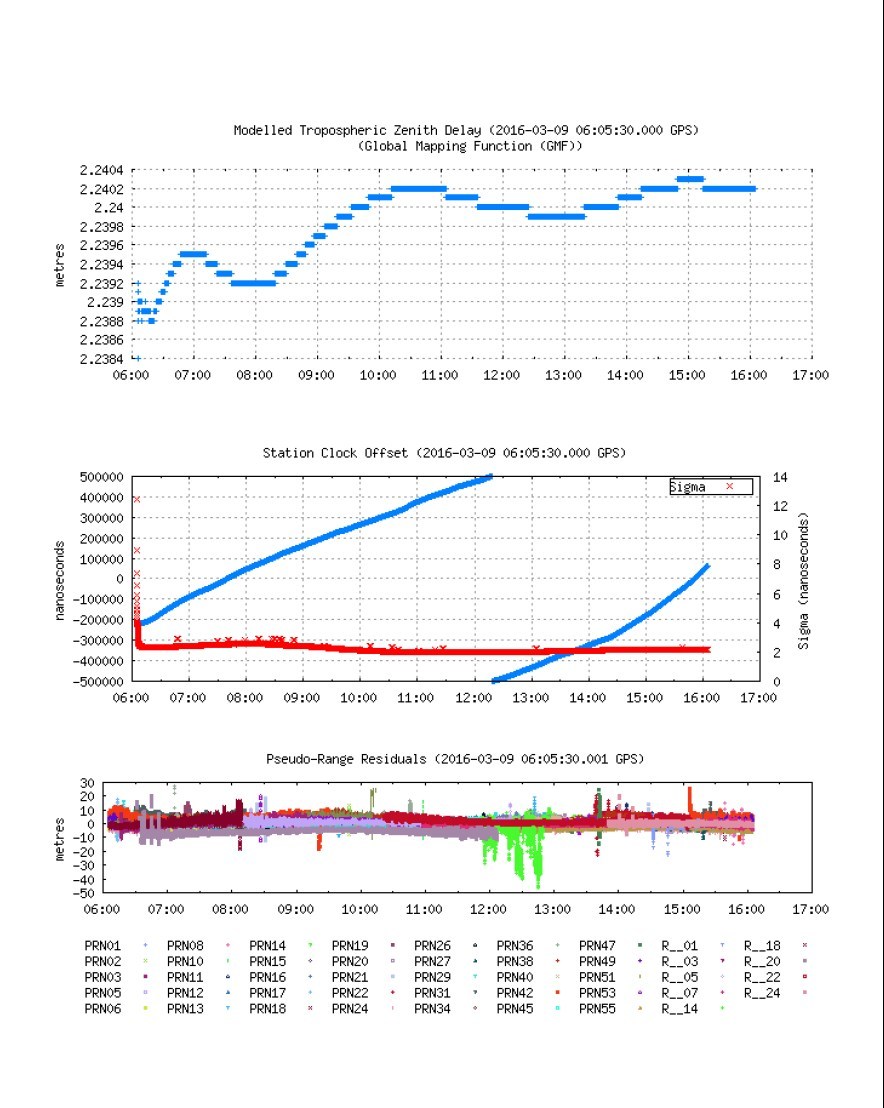
I’ve uploaded a few .obs files to a free PPP service here in Canada. It’s very automated and they email you a link to the results once processed. I’ve included a typical summary and images of the complete report below.
Here’s the upload page: http://webapp.geod.nrcan.gc.ca/geod/tools-outils/ppp.php?locale=en
My biggest issue is that the results are to NAD83 and not WGS84. The upload page has some other options such as ITRF but none are WGS84. I believe that RTKLIB and standard GPS units output WGS84.
They offer a service to convert between co-ordinates, but none are WGS84. It’s located here: TRX
I’ve found statements saying that the difference between WGS84 and ITRF is small, but that is very vague. Are they the same? If so, I could use the ITRF output directly in my base station. Right?
One other question, which height do I enter in my base station, the Ellipsoidal or Orthometric? The full report even has a 3rd height, Apriori.
Thanks.
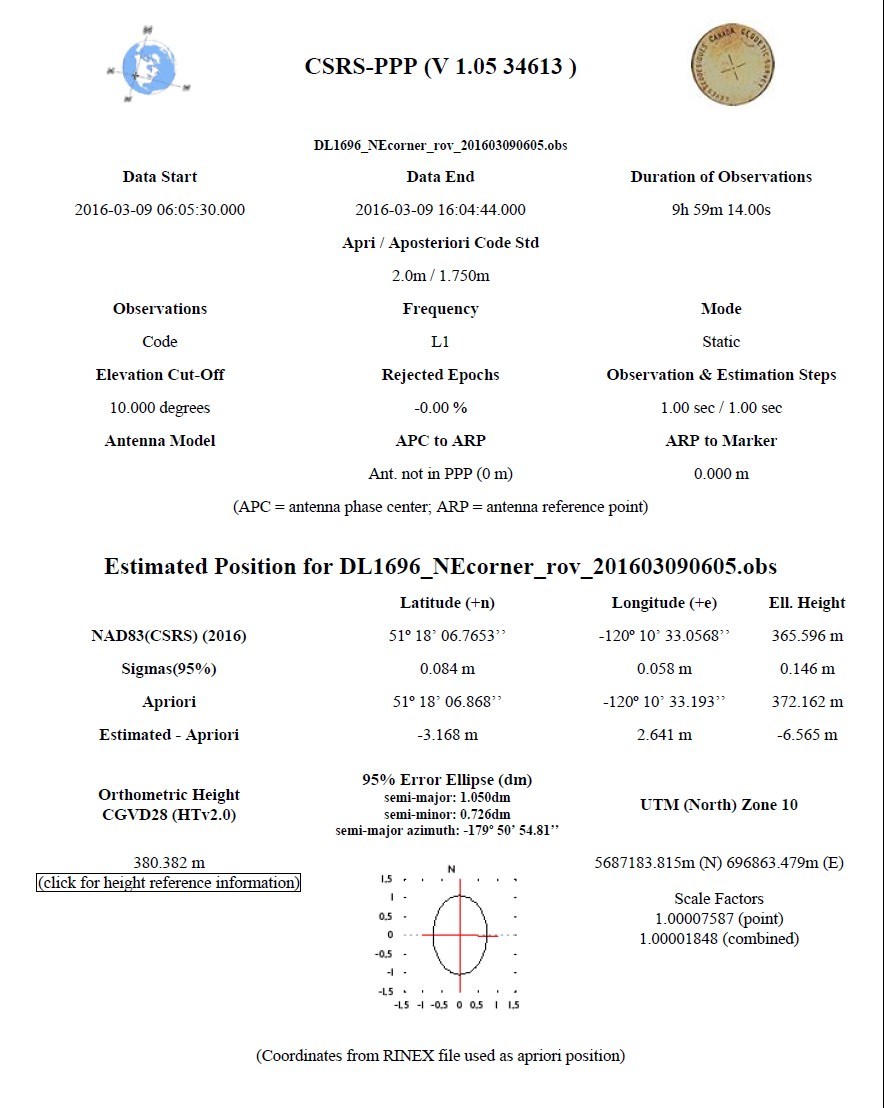
The estimated coordinates NAD83(CSRS) 2016-03-09 for the DL1696_NEcorner_rov_201603090605.obs RINEX file are as follow:
Latitude N51° 18’ 06.7653" ±0.084m (95%)
Longitude W120° 10’ 33.0568" ±0.058m (95%)
Ellipsoidal Height 365.596m ±0.146m (95%)
Orthometric Height 380.382m CGVD28
[51.30187925,-120.17584911,365.596]
UTM Zone 10 (North)
Northing 5687183.815m
Easting 696863.479m
Scale factor (point) 1.00007587
Scale factor (combined) 1.00001848
[5687183.815,696863.479,365.596]
Cartesian coordinates
X -2008663.893 ±0.076m (95%)
Y -3454578.704 ±0.097m (95%)
Z 4954896.455 ±0.129m (95%)
[-2008663.893,-3454578.704,4954896.455]
Orbits and Clocks Used: NRCan Rapid
GNSS Data: GPS_&_GLONASS
WGS84 ellipsoid used for (x,y,z) to (lat,long,h) transformation