



Hi guys.
I’m using Navio2 on RPi3 (ArduCopter 3.6.5) and am trying to publish messages to the setpoint_raw/attitude topic with ROS.
However, upon publication I get an error message :
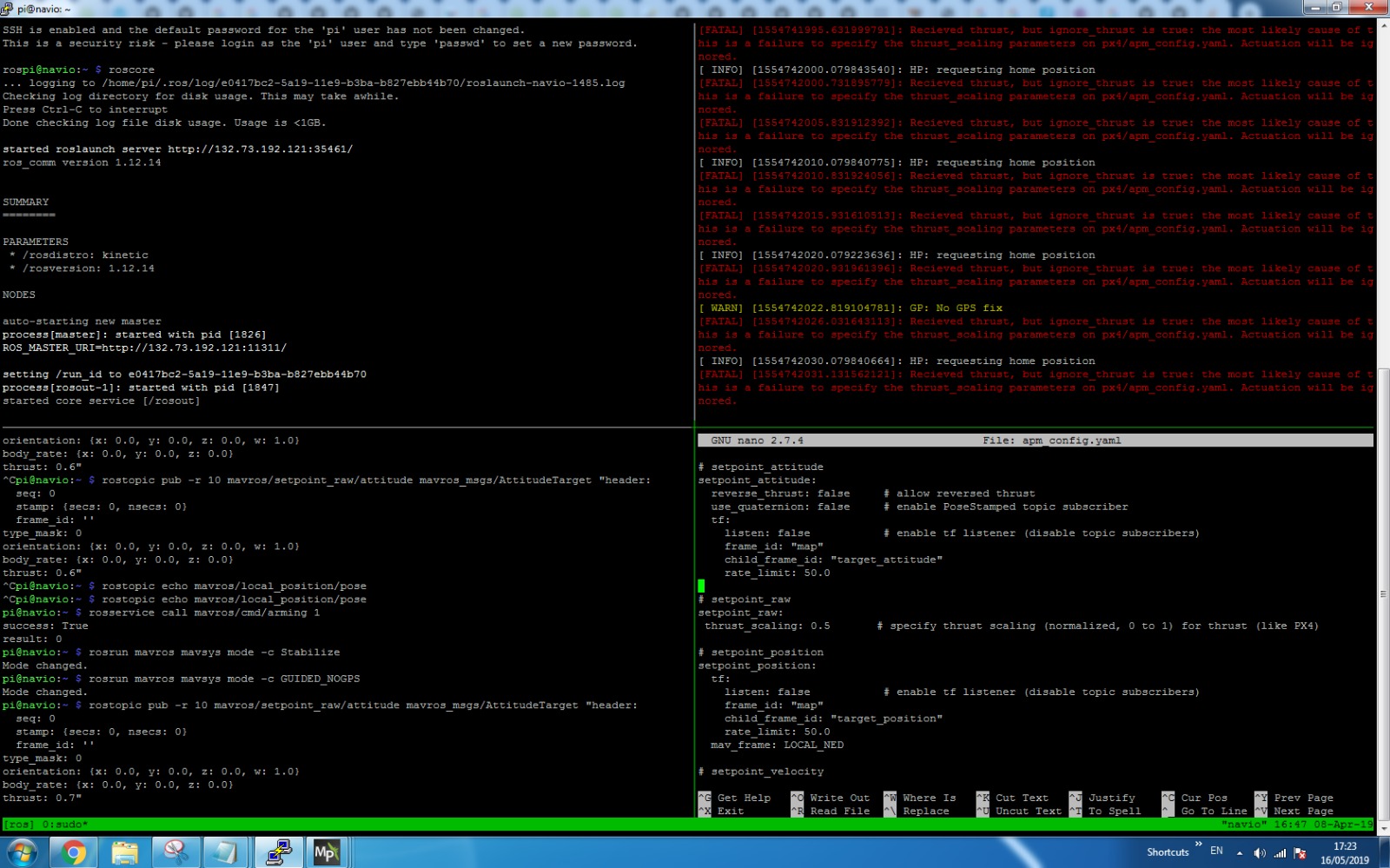
“Recieved thrust, but ignore_thrust is true: the most likely cause of this is a failure to specify the thrust_scaling parameters on px4/apm_config.yaml. Actuation will be ignored.” from the function void attitude_cb in setpoint_raw.cpp
Some digging in Github and the Arducopter community lead me to this RP:
https://github.com/mavlink/mavros/commit/762895ccc01a3ae3b2de9a3f4dfc894afdd65668e
Which states that the error is caused due to a typo (an extra space) that needs to be fixed in the apm_config.yaml file in /opt/ros/kinetic/share/mavros/launch.
I have corrected the file, saved it, reloaded configuration (daemon-reload), rebooted RPi, yet nothing changes, the message is still there.
Does Navio treats this file differently? Do i need to recompile the changes somehow? Would be happy for any assistance!
I have attached a screencap of the relevant panes (bottom left message publish, bottom right the fixed yaml file)
Thanks.