Good Afternoon.
New to the Emlid Reach RS2+ world here and struggling with our ground control point workflow with PPK solution using OS RINEX data as we only have one receiver…however we’re struggling to obtain a fixed solution. Looking for some help/advise please.
Currently we are setting up over an unknown control point, powering on the unit, waiting a few minutes before starting a log file, conducting a 5-minute base configuration, then recording a point in Emlid Flow with SINGLE averaged observations over a 45 minute period. Wait another couple of minutes and then ending the log. All within an hour so we can utilise 1 hr RINEX file from the OS during processing. Move to new GCP, rinse and repeat. All GCP locations are in good positions and free of any obstructions.
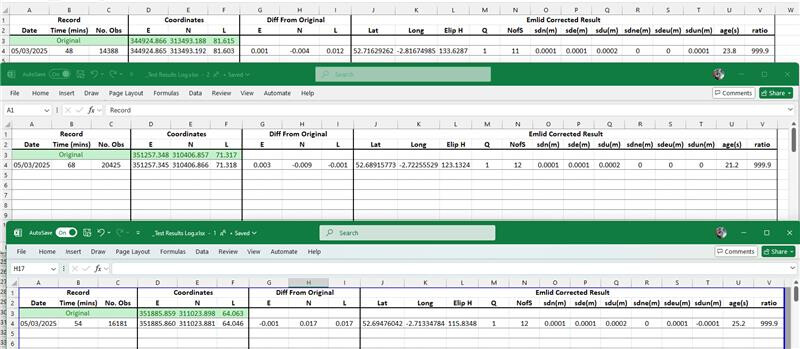
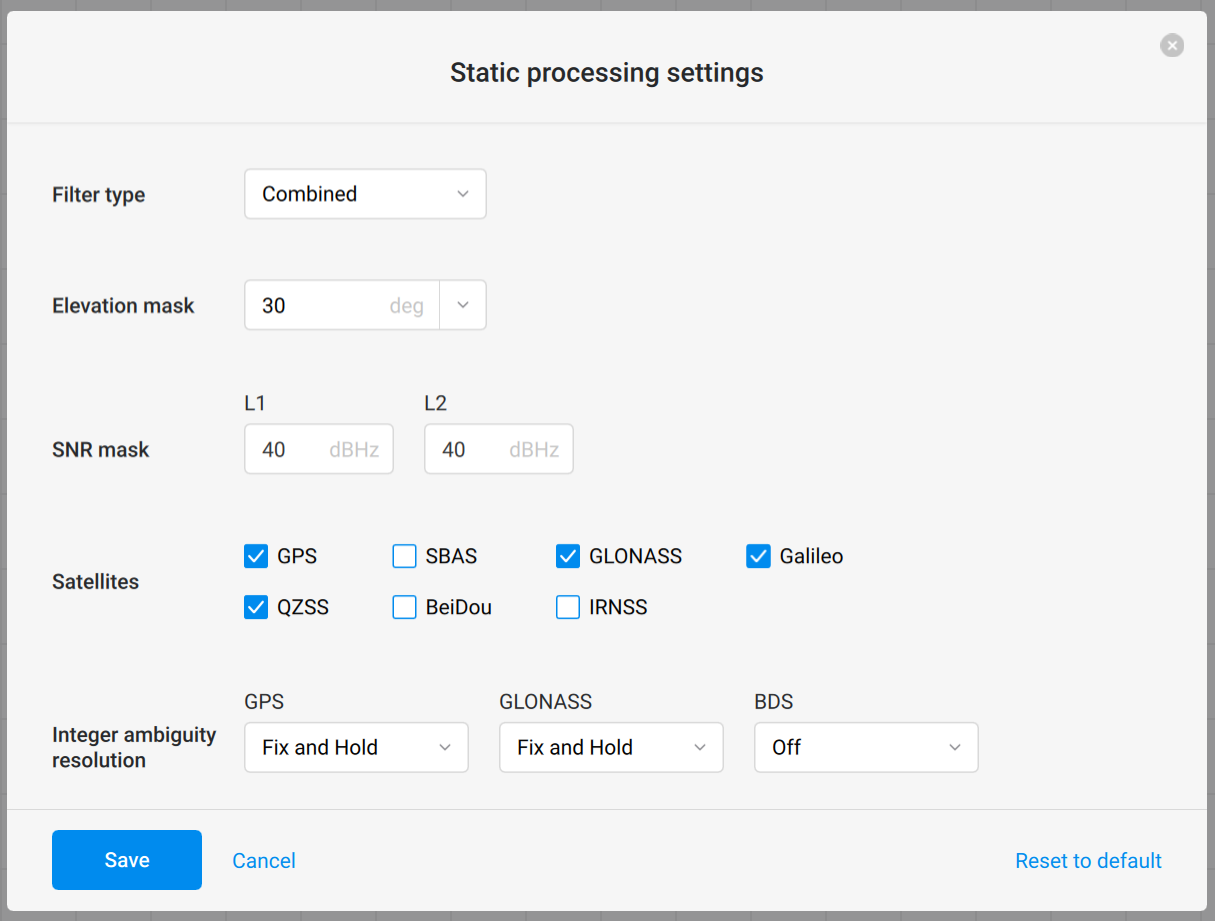
Log files are downloaded along with the CSV file for the recorded points and run through Emlid Studio 1.9 via stop & go. Use Observation & position files from the receiver and the RINEX from the OS to generate new position file with the default settings other than a combined filter type. However we never get a solution so have to run either forward or reverse and then only a SINGLE solutions to the tracked positions is found, then run against the CSV returns SINGLE solutions for the recorded point(s).
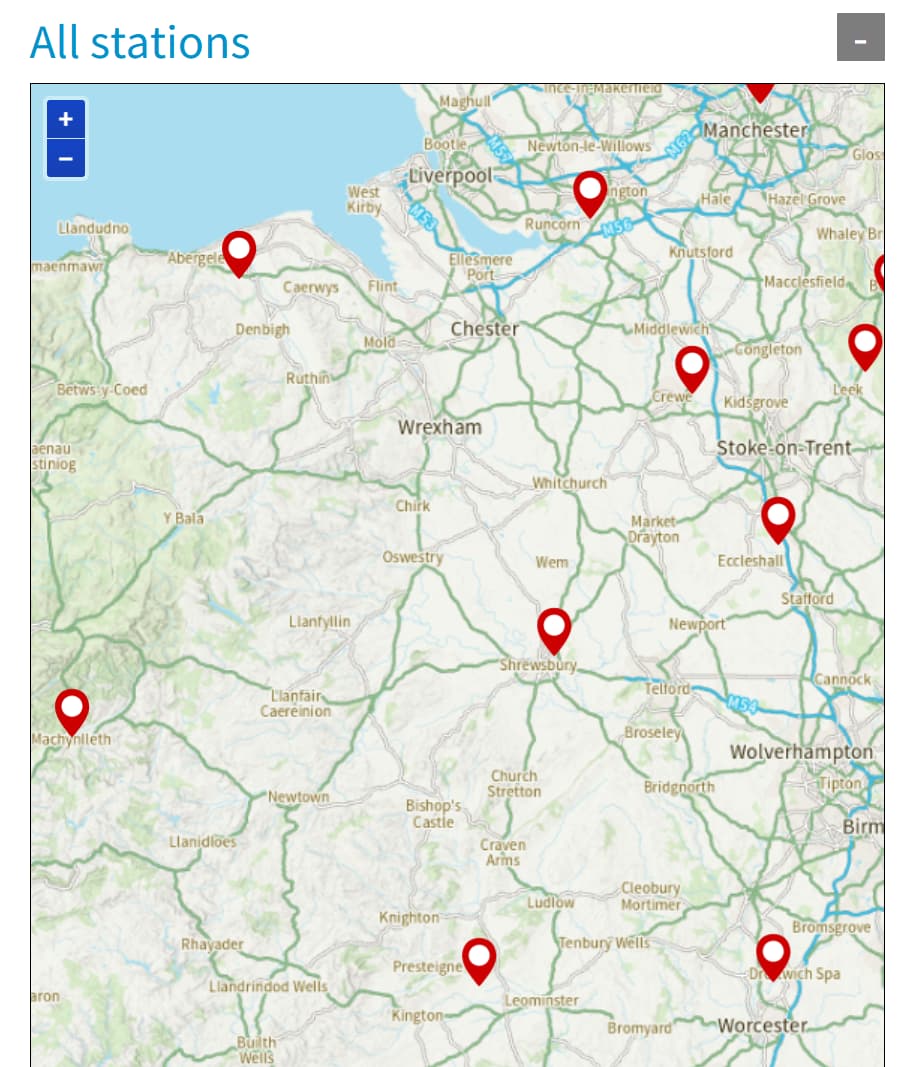
The OS base we are using is in Shrewsbury (SHRE) and is never more than 40km away from anywhere we will be operating.
Help…