Hi guys,
I just successfully update both receivers from 0.4 version to 2.5.1, layout looks completely different and I’m lost.
I am using reach to collect coordinates of GCP, my set up look like that:
1 reach as base: log to file
1 reach as rover: log to file, no connection to base, then postprocess whole observation in the office.
Anyone can advise me where i can set those setting in new version of ReachView? Also I can’t see any START and STOP button, how i can start collecting observation?
Thank you.
Magda
Hi Magda,
We have the reworked documentation for ReachView 2 and the docs have convinient search now, please take a look here.
For collecting GCPs you can use Survey Tool.
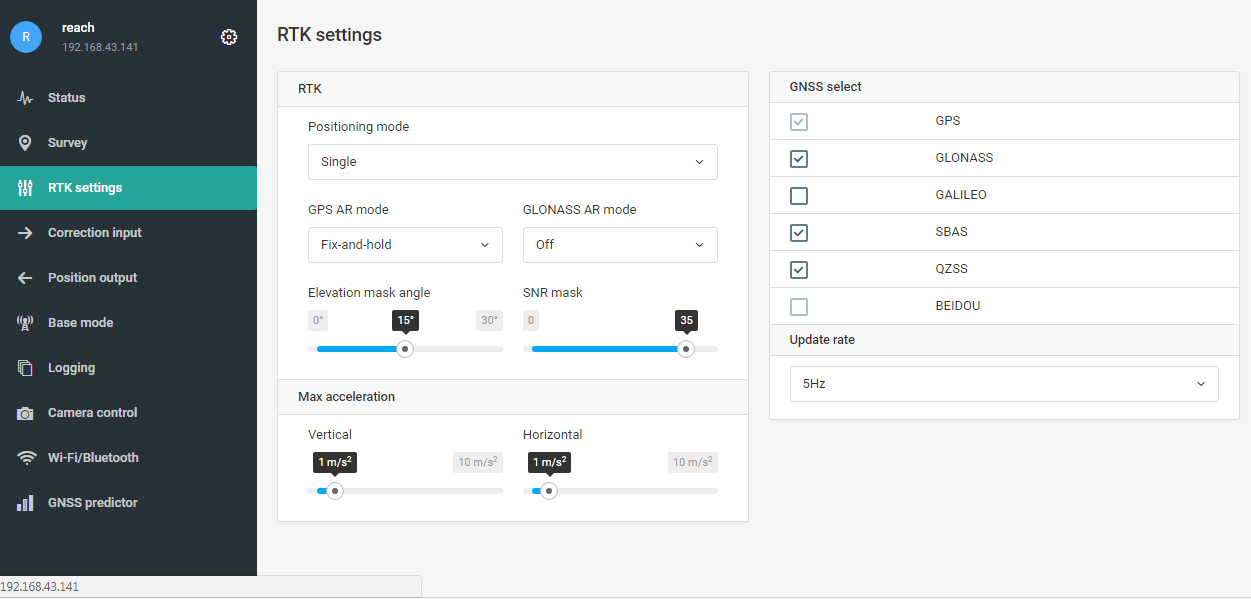
I’m slowly getting there… to having same set up as in old reach view should I change in both emlid positioning mode from kinematic to single in RTK settings tab?
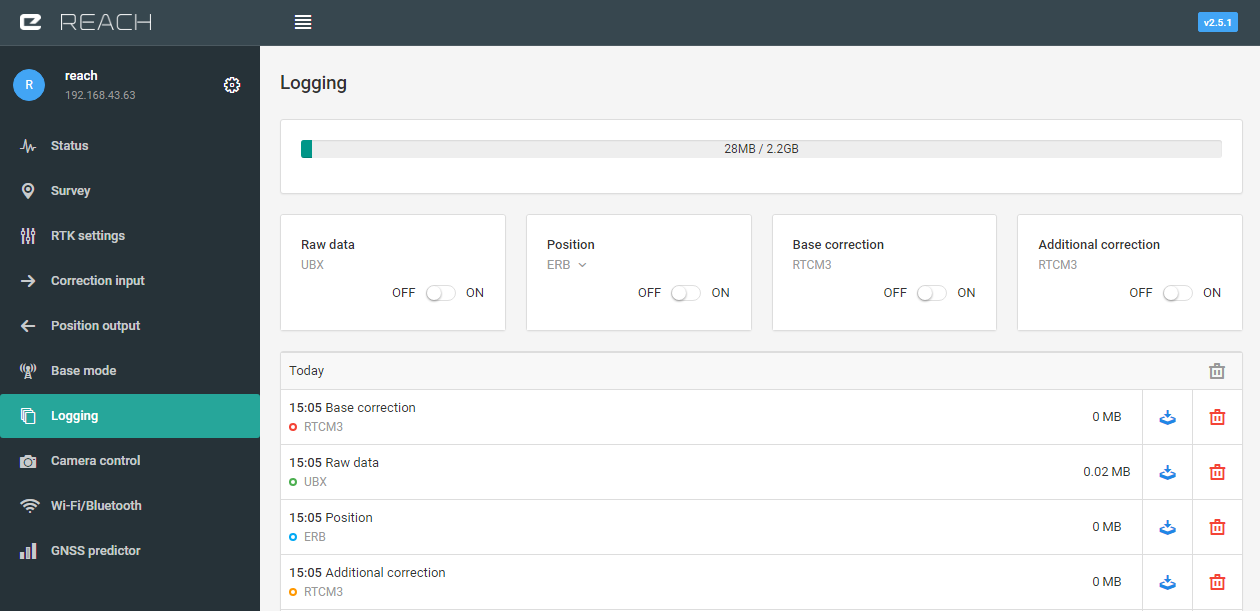
I realised that emlid automaticly start collecting data since I plug in into powerbank. It looks like I can manauly turn it of and off in Logging tab. In my case I think i just need logging UBX data so position, base connection and additional connection can stay turned off.
ps. I haven’t found anything about survey kit tool in Reach RTK docs… I would like to use it but it will works if my rover is not connected to base station?
Survey is used mainly with rover.
Its a new feature, not updated in docs, yet. While its pretty straight forward and might figure it out before docs is out 
For good measure i set base to static or singel. Its easier to identify what is whats when jumping around the screen.
1 Like