I have been testing PPK the last couple of months. The last time in a small mapping operations. After using the drone and base file, correcting the photo’s, the project was no more accurate than before correction. I have BTW corrected the .pos file, because number of photo’s was too high. I am sure I am making mistakes and of course dying to know what I do wrong. Would it be possible to upload my data here?
My equipment:
Emlid Reach RS
Emlid Reach M+
DJI Phantom 4 pro v2
Mettatec PPK set
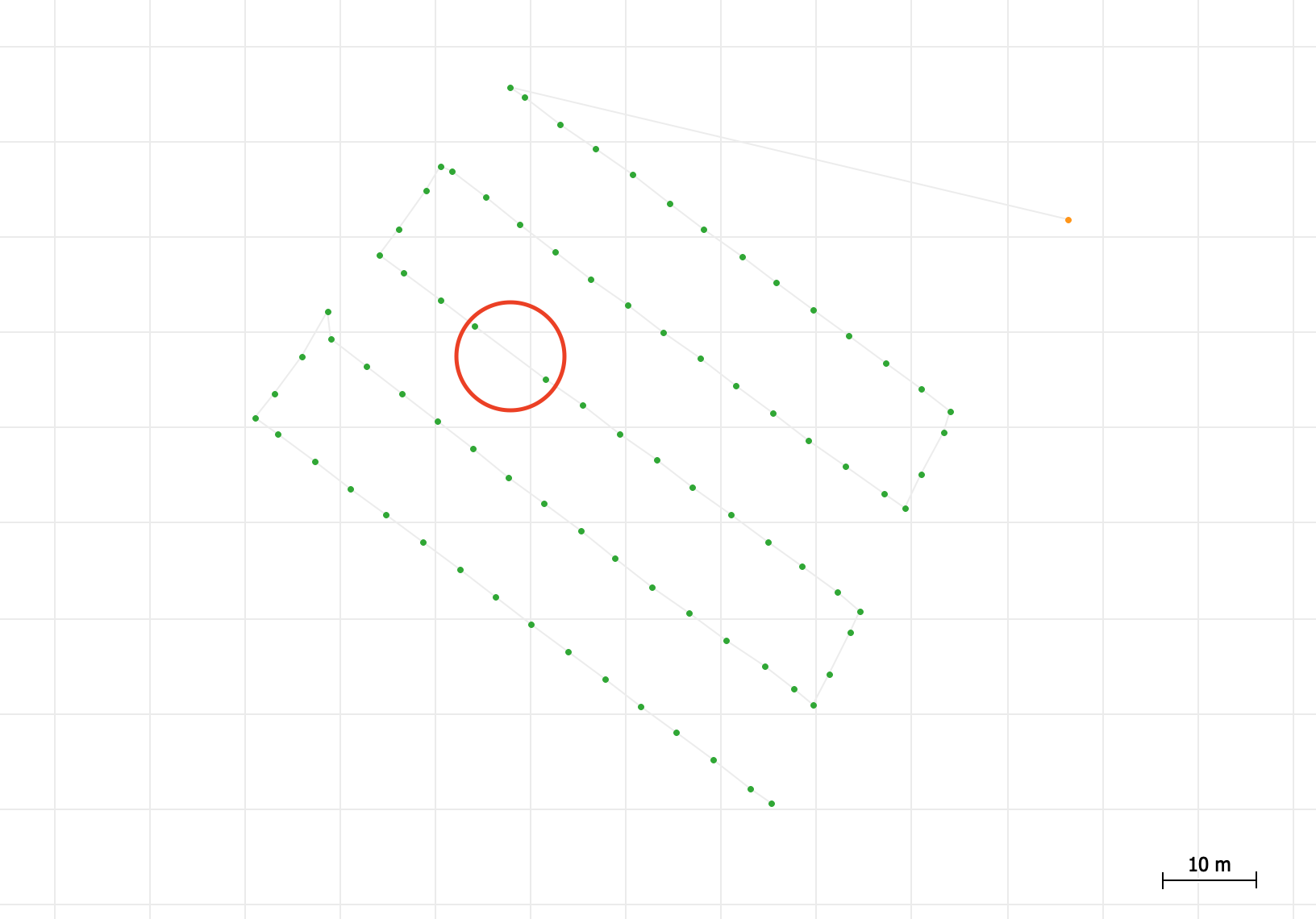
Extra photos
It seems like extra photos are taken during the ascent stage of the UAV. I think adjusting photo triggering settings on the UAV side should help you.
The Antenna or the cable may be affected by the hardware. You can check our recommendations on Antenna placement and Reach isolation in the Docs. It should help you improve the quality of the data.