Howdy! Good day to you all!
I have been trying to use Reach as a single GPS to get better results then typical 3DR GPS module (but without using RTK corrections) with Pixhawk.
Unfortunately my results are terrible until now, and I would like some help to solve my problem.
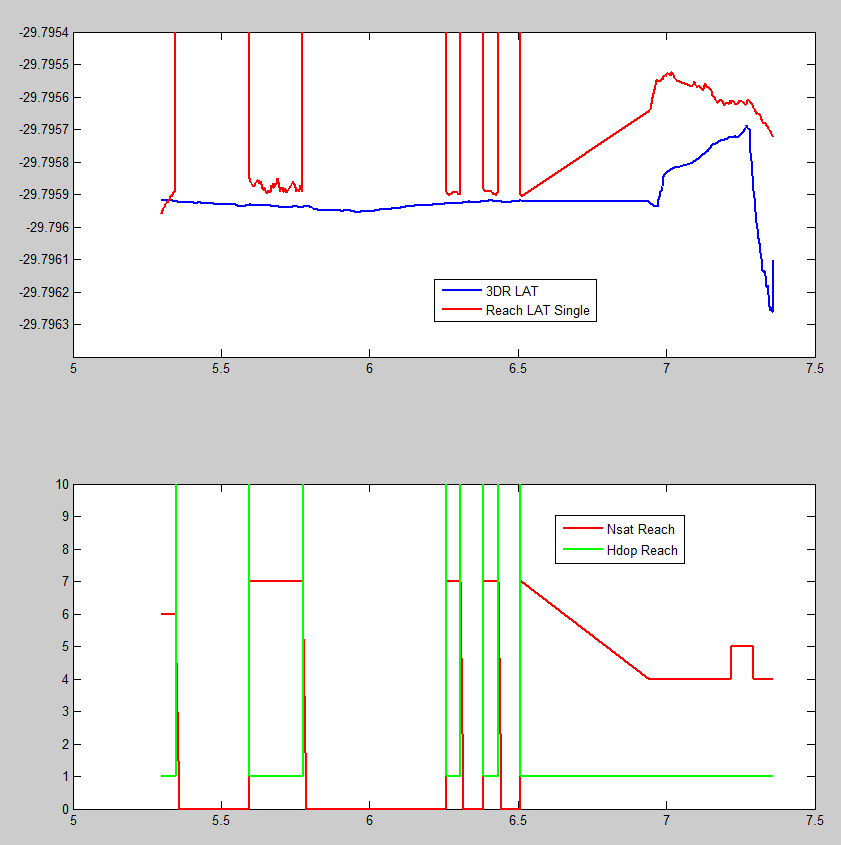
I connected each GPS alone for comparison. The 3DR got me a fairly stable Loiter, with SatCount = 7 and HDop = 1,1.
When I used only the Reach I got better values: SatCount = 8 and HDop = 1, constantly. It was expected to get better results, but it didn’t happen. The
copter started oscilating many meters around the Loiter point!
With both GPSs as redundancy, the Pixhawk selects the lower HDop, so it uses Reach, and it dances around just the same.
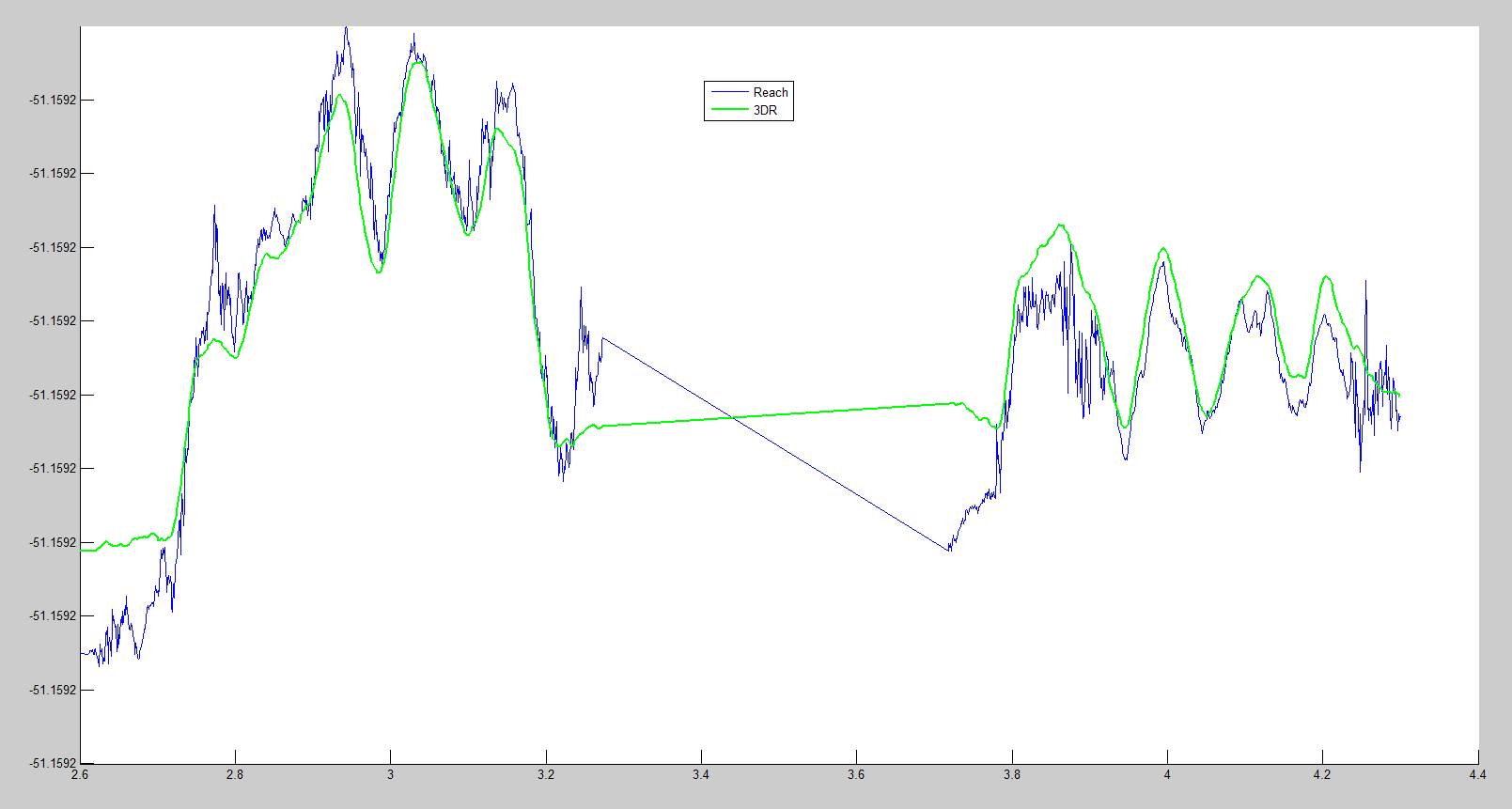
I ploted the graphs of longitude of both GPSs in MATLAB, and I found out that Reach had a LOT of noise compared to 3DR.
Note: Reach@10Hz, 3DR@5Hz sample rate.
Hello Enio,
Reach really shines when used in RTK mode, in single positioning a normal u-blox module could be better. I think that single positioning was not given lots of love in RTKLIB as it is not the main target of the project.
SatCount = 8 indicates that you are not using Glonass in settings which should improve the solution.
Thank you Igor, I will try setting GLONASS as well.
I will try the RTK mode to compare as soon as it stops raining  then I show you my results.
then I show you my results.
I changed Reach’s update frequency to 5Hz, to see if I could get less noisy results (failed), still trying to use it in single, but a much worse behavior appeared.
During a no-props test in the backyard I got sudden loss of satelites, Nsat went to 0 for a few time and HDop went to maximum. LAT and LNG went to 0. Seems like the Ublox just browned-out, although Pixhawk’s board voltage was steady. The 3DR GPS remained with GPS status/nsat/HDop unchanged.
Did anyone ever have this problem?
Hi Enio,
This looks like there was no data coming from the GPS at all. Probably there was an electrical disconnect? Please check connectors/wires. If it is repeatable, set Reach to log both raw data and solution to file and send them to us along with Pixhawk logs.
Again, you should not expect any improvement when using Reach in single mode compared to a normal u-blox module. The dropouts should be investigated though.
Hey Igor,
I ruled out bad connection, because Reach did not restart (takes a long time to restart) and I inspected the connectors thoroughly.
I also changed the configuration to GPS+GLONASS 5Hz and the “brownout” vanished. Still quite a noisy signal. Does the 3DR module implement a low pass filter that the Reach Single does not?
I did not record the logs, unfortunately. I’ve been using reach only for a short while, so I did not get the “good practices” yet Next time it happens I’ll get it!
Hope it does not happen in RTK mode, I’ll try it next week.
@igor.vereninov
I finally used Reach in RTK mode, and again I had the same problem. I am having a few dificulties to synchronize the Pixhawk’s and Reach’s logs, so I’ll only post the Pixhawk’s log analysis.
I’m using Reach as main GPS, and 2nd GPS is OFF. Base is connected through Ethernet over USB, a HK radio link and GPS injection in Mission Planner. Reach is connected to Pixhawk throungh the main GPS serial port.
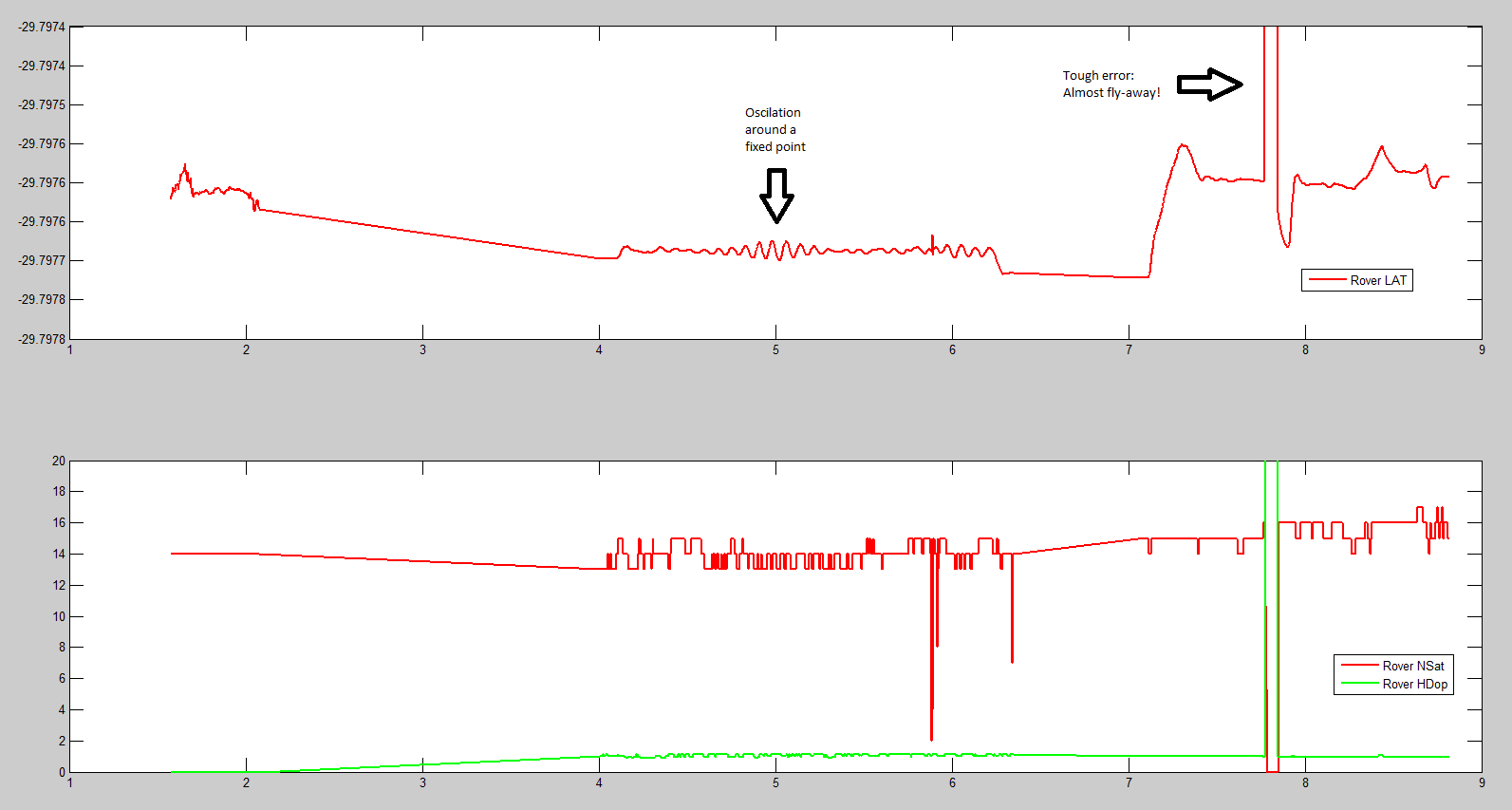
You were right, in RTK mode Reach is amazingly more precise than in Single mode! During the “good parts” of the flight test, Rover mode was extremely accurate. I had 2 problems, though:
-
The drone oscilated around a fixed point for a few seconds.
-
Once again I had what seemed a disconnection between Reach and Pixhawk.
Did this problem happen to anyone else?




 then I show you my results.
then I show you my results.