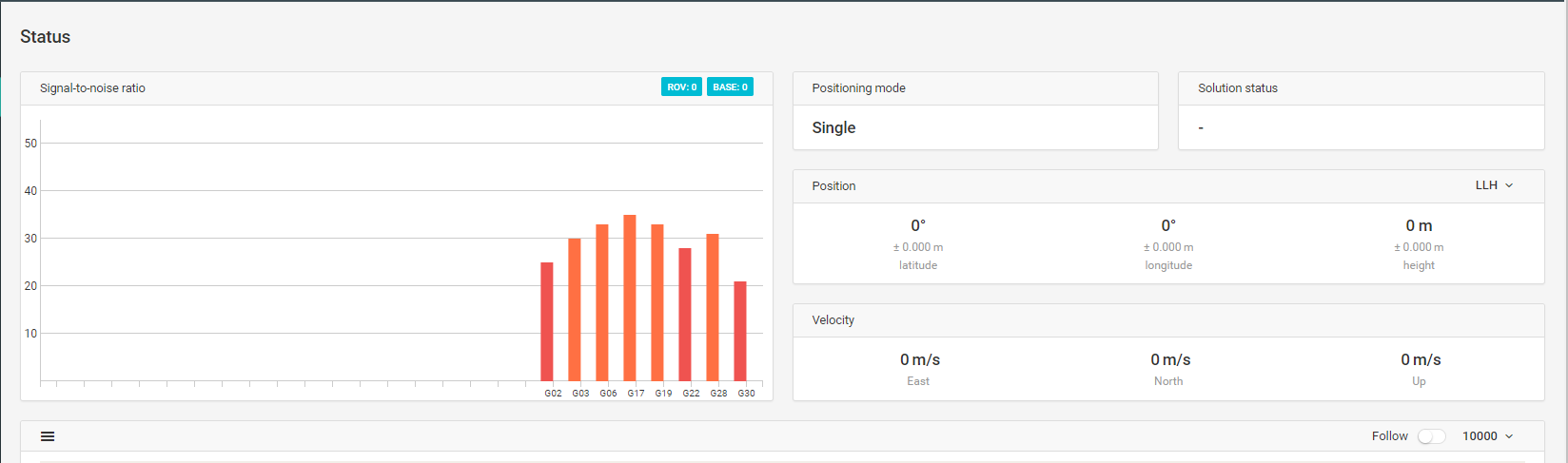
After upgrading from v0.0.3 to v2.5.2 I’m unable to get a single solution status from my Reach device. The LED stays green now where on the earlier version it would cycle through white->green->blue->green. Below are screenshots of my status and settings windows.
As you can see, the area I’m testing in isn’t great but on v0.0.3 I was able to get a consistent single solution and even float when the base station is set up. I tried lowering the mask settings with no results. Any thoughts?
This is due to signal masking. Basically, we don’t use signals below certain configurable SNR level, because they might affect the solution in a bad way.
Thanks for the responses. Is the signal masking you’re referring to the SNR mask setting I have set to 10 (as shown above)? Or is there another mask variable? I’m just asking because lowering the SNR mask in the RTK settings wasn’t giving me different results.
I realize the signals are bad in this scenario but in v0.0.3 I was able to achieve a single solution in the very same environment. Even if it’s prone to large position jumps, I would like to have access to the data since I’m filtering it with other sensors on my rover (IMU, LIDAR, wheel encoders). This data is still very usable when implementing a Kalman filter. So, is the answer reverting back to an earlier image?