



Hello,
I have been working with the Reach RTK devices for a quadcopter. I have been trying to get a good RTK fix that lasts longer than a few minutes. I have a few questions:
- What am I doing wrong with my configuration?
- What kind of accuracy/ error should I expect with this system (in real time)? The best I have seen on the Reachview app is +/- 7 cm.
- When the Reachview app shows Kinematic Fix, mission planner shows “rtk float” (and a status of 5). Is this correct? It seems like it should show “rtk fix”.
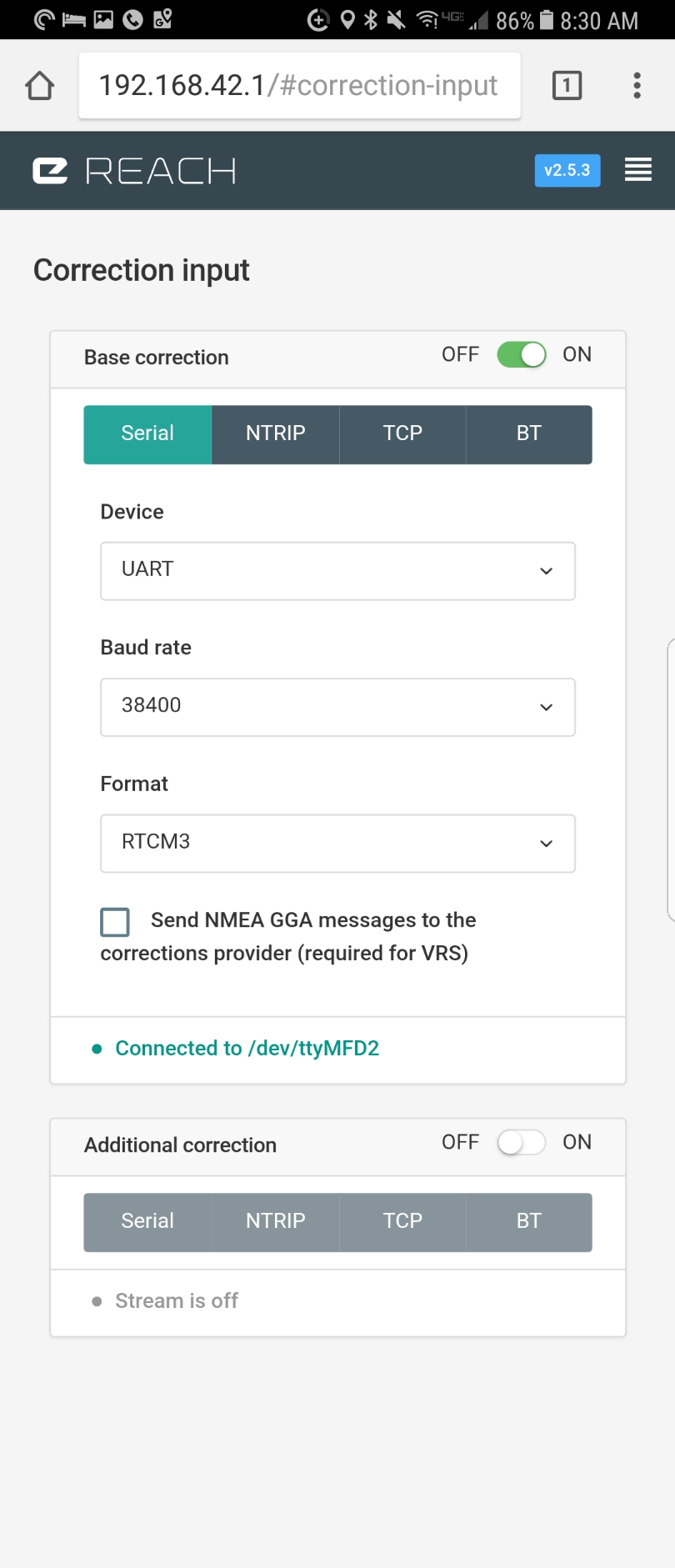
I have one Reach unit sitting on a tripod that I have configured as a base station. The second unit is in the quadcopter. The quadcopter is running an Navio2 autopilot. I use Mission Planner to inject the base GNSS observations into the MAVlink data stream. All the data/protocol links appear to be working correctly (the rover gets the base observations and Navio2 gets the corrected GNSS from the Reach.)
The base station has a nice ground plane (12 cm x 12 cm AL plate 1-2 mm thick) and is using a Tallysman 3710 antenna
The quadcopter does not have a ground plane but the antenna is Maxtenna Helical L1 Active M1575HCT-A-SMA.
Firmware image: ??? not sure where to find this. I updated to the most current a month ago.
ReachView version: 2.5.3-r0
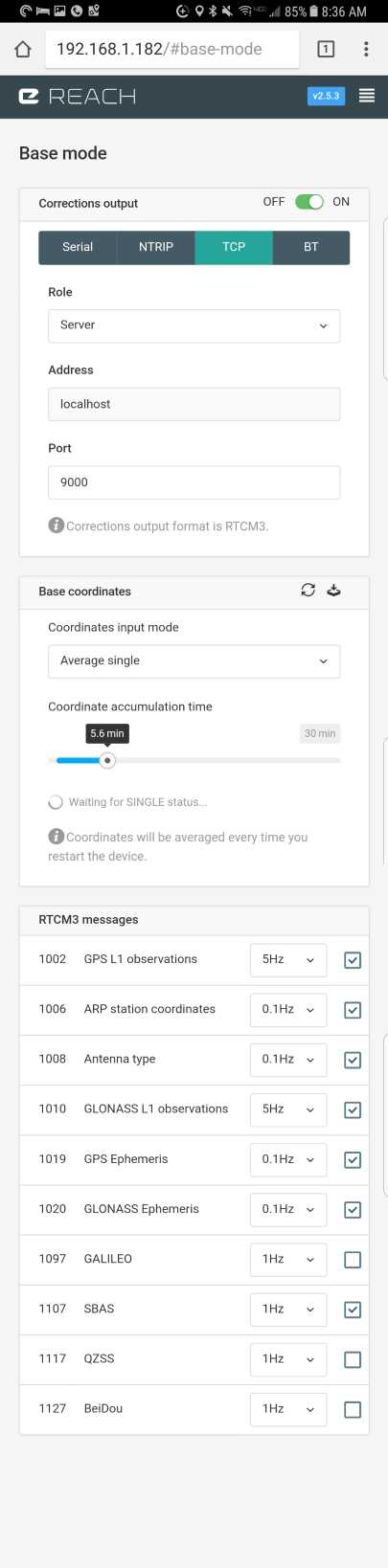
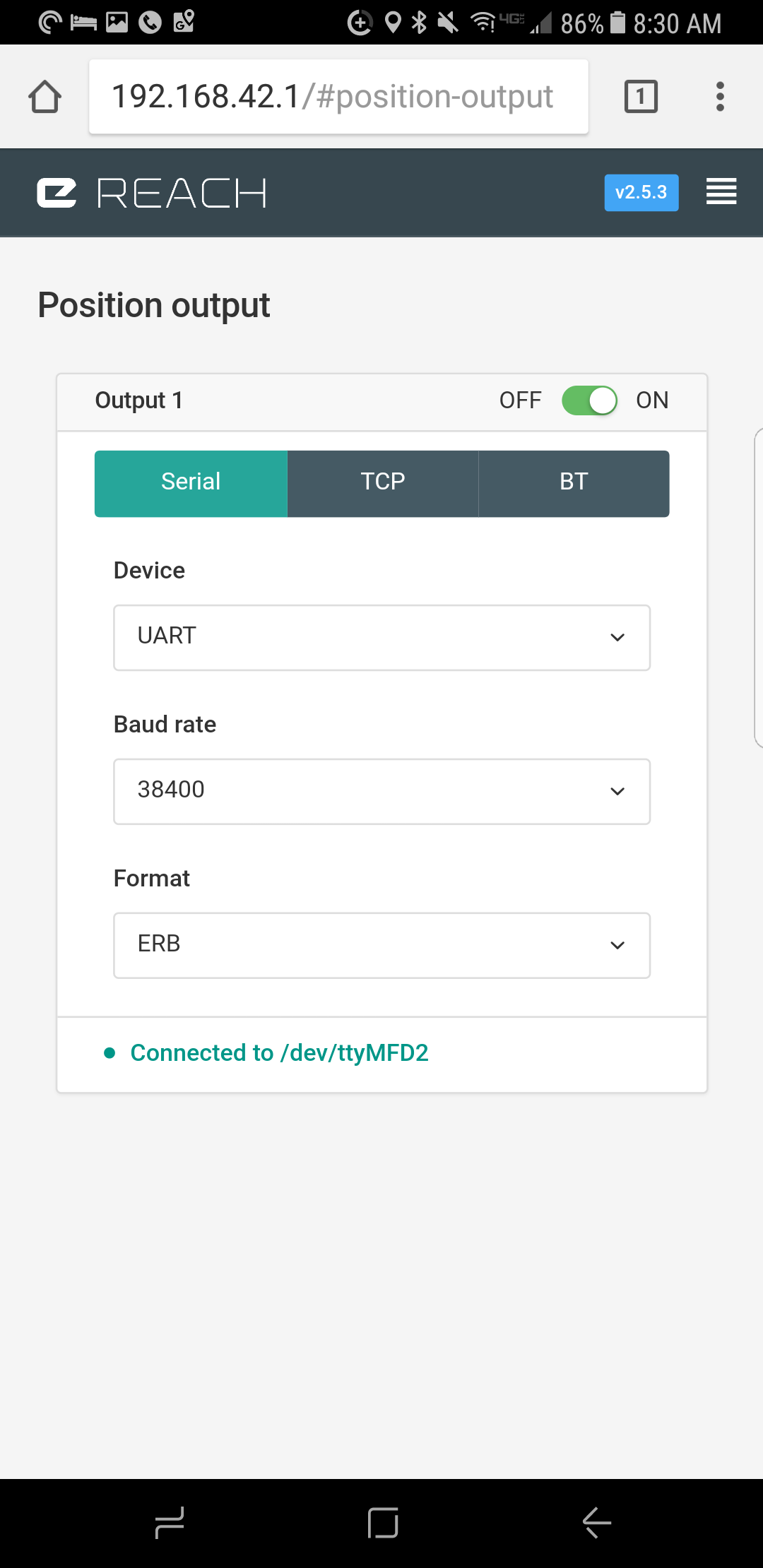
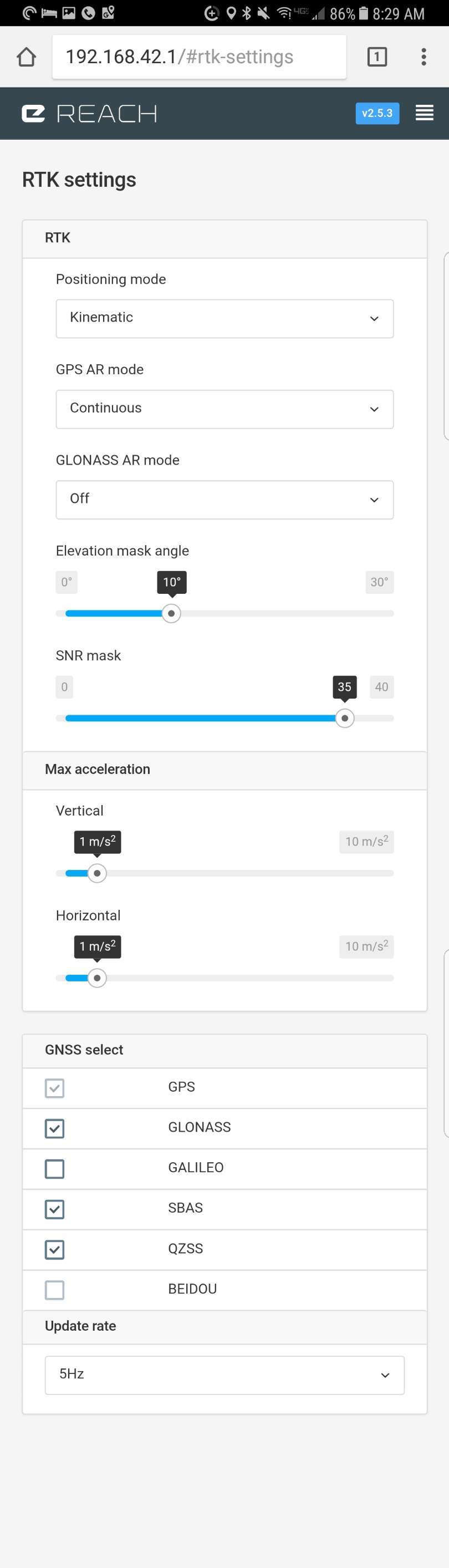
Base station configuration screens:
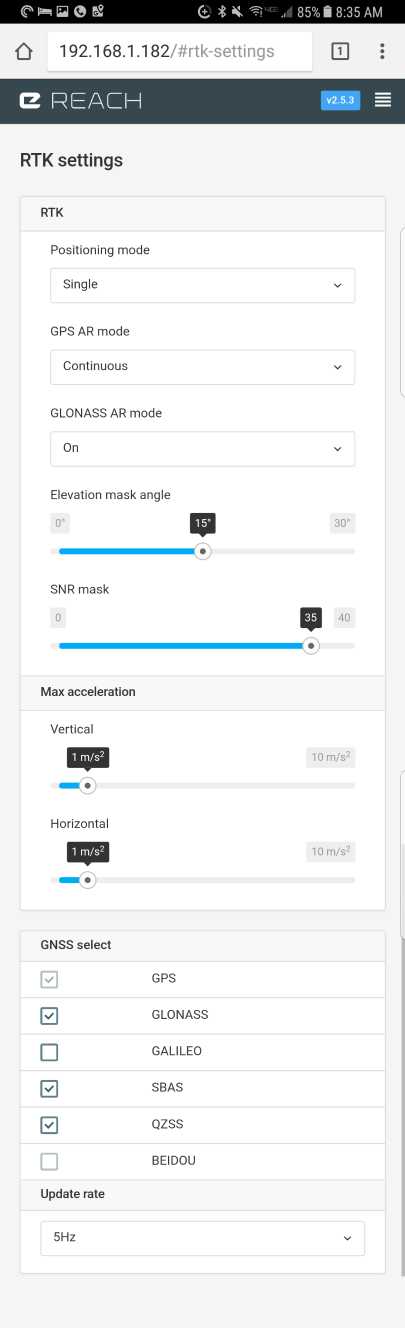
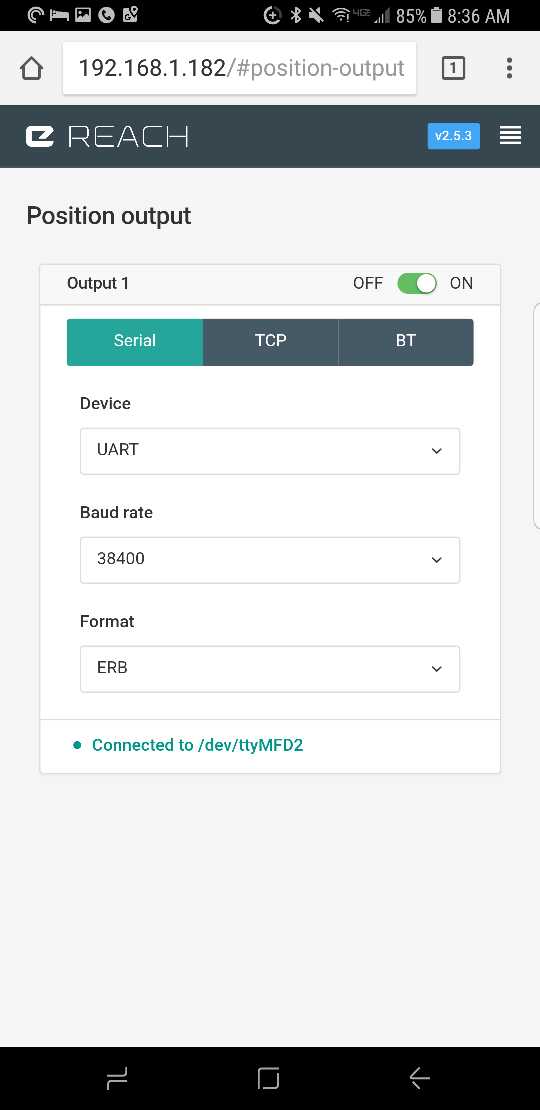
Rover station configuration screens:
I’ve never worked with RTKLIB so I may have the wrong files attached for that but here they are:
I guess I am not allowed to upload attachments as a new user.

 You upgrade firmare by connecting reach to a network with internet access
You upgrade firmare by connecting reach to a network with internet access