I am a senior electrical engineering student and for my senior design project I am working with a team to create an autonomous(or at least semi-autonomous) quadcopter that will retrieve a payload(12 oz can of beer/soda) using a claw mechanism(3d printed) and then deliver this drink to a destination.
As the semester is coming to an end and our testing is coming up VERY soon, we are officially in panic mode and are having issues getting all the software and communication between devices up and running.
Parts(just a few that ill list):
RPi 3 Model B with Navio 2 HAT(mounted on 3d printed anti-vibration board)
3DR 915 MHz (US) Telemetry Radio
5000mah 14.8V 50C 4S1P LiPo battery
MAJOR STOPPING BLOCK RIGHT NOW: Mission Planner connection
I have read through all the documents in the emlid docs section and many forum posts yet I still cannot solve this connection issue. The initial setup in mission planner requires you to update the firmware on the navio however I am under the impression that this is not possible. I have tried to connect the navio through usb to my laptop however it is unrecognizable. I have successfully connected the telemetry in the optional hardware section but when I try to connect in the flight data section it always fails.
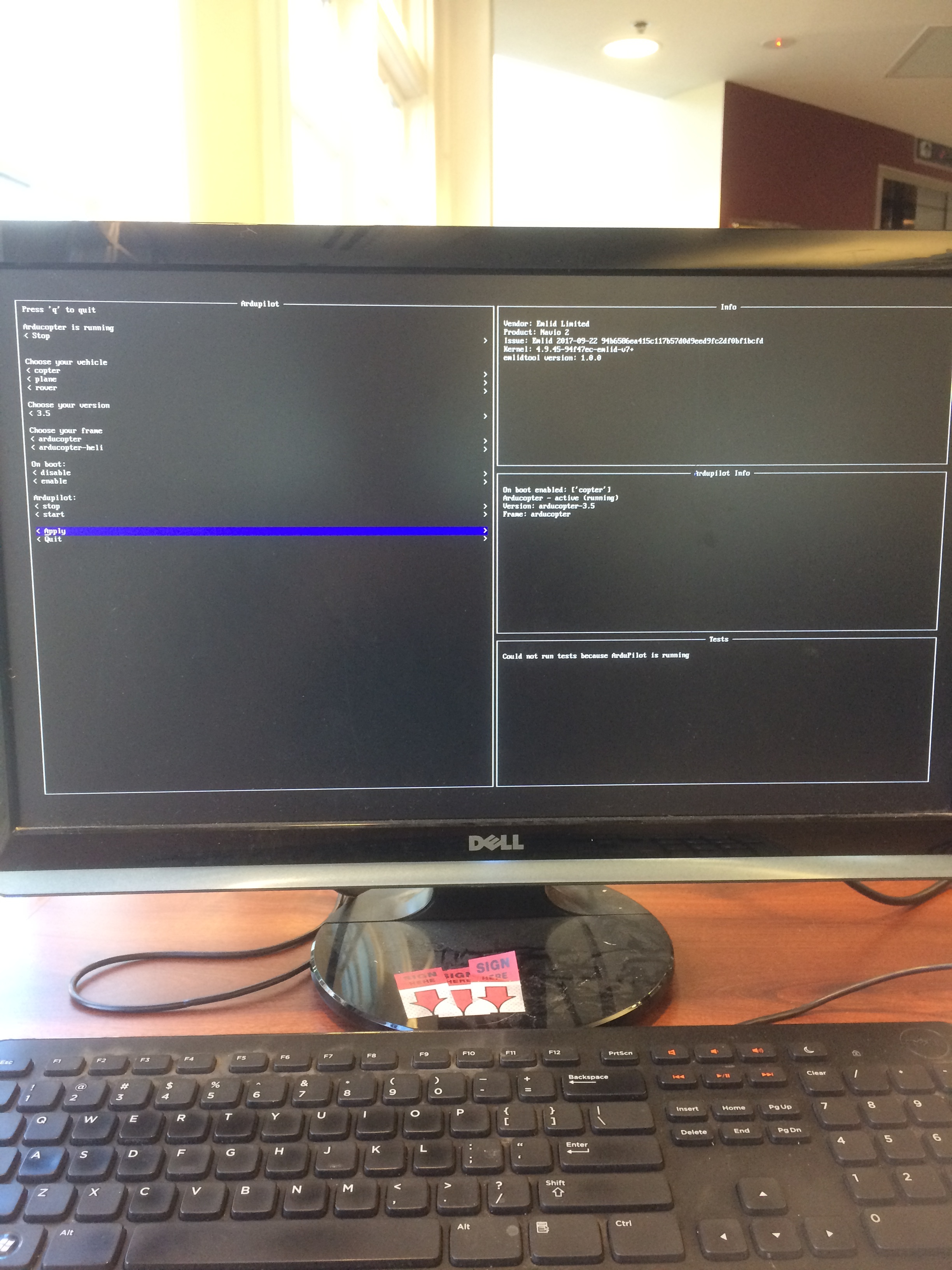
EDIT: entered sudo arducopter -C /dev/ttyAMA0
Started getting some crazy looking results on my monitor but then I opened mission planner and it connected to COM3 where my telemetry is plugged and it picked up some GPS but nothing seemed smooth. Also not seen in picture below was the error pos vert variance that was constantly there. Would appreciate a point in the right direction from here thanks!
Also we do not have an RC controller as we had planned to control all motion from the ground control. Will we have to purchase a controller in order to calibrate the brushless motors??? We are right at the edge of our budget(which wasn’t much to begin with) so the most cost effective method someone can think of would be ideal.
We’ll try to guide you through. But please, turn off the panicking mode because it won’t do any of us any good! So let’s break it down.
We follow the Debian workflow for updates. Please, read this entry. The update mechanism in MP is very Pixhawk-specific.
Have you calibrated your compass?
The suggested workflow is to use emlidtool to enable/disable/start ArduCopter. If you interfere with it in some way like you just told us, you’ll get very unstable system as essentially you can end up having two instances of ArduPilot running at the same time. So just stick to the usuals chores.
The easiest option is to buy the cheapest transmitter and receiver with PPM/SBUS. They are under $100 on Hobbyking. Other option might be to use a joystick. Some of our users have used it in the past. So just look it up on the forum. If doesn’t work for you, we can come up with a hack to calibrate the ESCs. But we’ll need an exact model and make of them. Essentially you’ll just need to hook up your ESCs (I strongly advise you to perform it without the props on) when PWM on the channel wait for ESCs to beep (if yours beep) and then set PWM to the lowest value. In order to do that you can make use of our examples. You’ll just need modify it to do what you need.
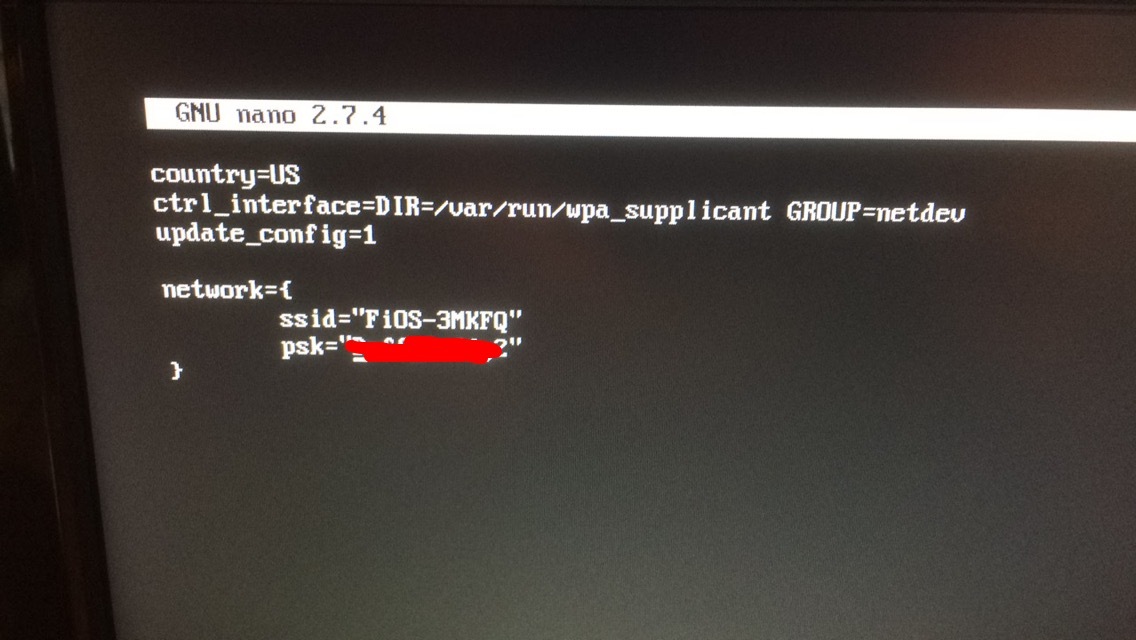
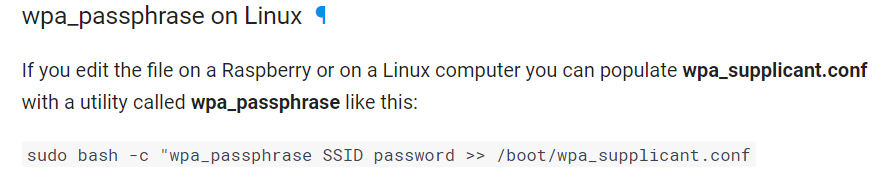
Wow thank you for such a quick response! It is fall break for my university and I have been staying at my teamate’s house the past couple days working from early morning to late night non-stop so we have made some decent progress. We have successfully connected MP to the navio through our telemetry and even calibrated the compass. The one issue we keep running into is connecting to wifi on the RPi so that we can download the updates as you suggested above. We have used sudo nano /boot/wpa_supplicant.conf and then changed commands as seen below:
Also, when checking for connectivity after reboot, we constantly get responses like interface wlan0 not configured or device not detected.
Unfortunately we made an error in thinking we didn’t need a remote(we are new to drones in this course and were tossed into the wild with no help, just online research and self teaching). So purchasing anything at this point will put us over budget. I will have to read more into the joystick(virtual?).
But here are our parts: Hobbypower SimonK 30A ESC Brushless Speed Contoller BEC 5V/2A
WOAFLY 2212 920 kV Brushless Motors
Sorry for entering panic mode I’ve jumped out. Just needed help as soon as we could get it since we need to start testing this drone in a week. Thanks again for the help.
Here’s how you use a real joystick with MP and ArduPilot. The only missing part is the virtual joystick part. I guess this might work. But I haven’t tested it myself.
Checking back in again. We had had our first semi successful lift off the ground, but it quickly flipped over and only broke one prop. We did all the calibrations through mission planner. Also bought a Flysky FS-i6x transmitter and Fs-iA6B receiver. Trying to follow ardupilot.org suggestions but im worried our lack of weight distribution symmetry may cause issues. Isn’t the Navio2 able to help stabilize for takoff and landing? I’m just a bit stuck.