I am doing mapping on Sony A6000 camera with arducopter along with emlid reach RS2 as PPK module.
I have gone through the emlid manual regarding camera and Reach Rs2 connection, then I found one more connection to the camera hot shoe port from the reach M2 .
documents says you have to connect camera hot shoe to raising edge of the signal or falling edge of the signal to store the Gps co-ordinates .
how to find the whether its raising edge or falling edge of the camera . its will change camera by camera if change other camera?. Please some one kindly help on this
Reach M2 requires the hot shoe access to register the camera’s shutter signal. Due to that feature, the precise photos’ centers could be found during post-processing. The Sony A6000 has a hot shoe, so you can easily integrate it with the receiver.
This integration allows Reach M2 to register the exact moment when the camera takes the photo and record this time mark to the raw data log. Usually, an autopilot triggers the camera, as it has more information about the flight plan and can make more informed decisions on when to fire the camera. Please check our guide on how to configure Reach M2 for PPK mapping for more detail.
It does not matter if the camera using rise or falling edge, M2 detects both.
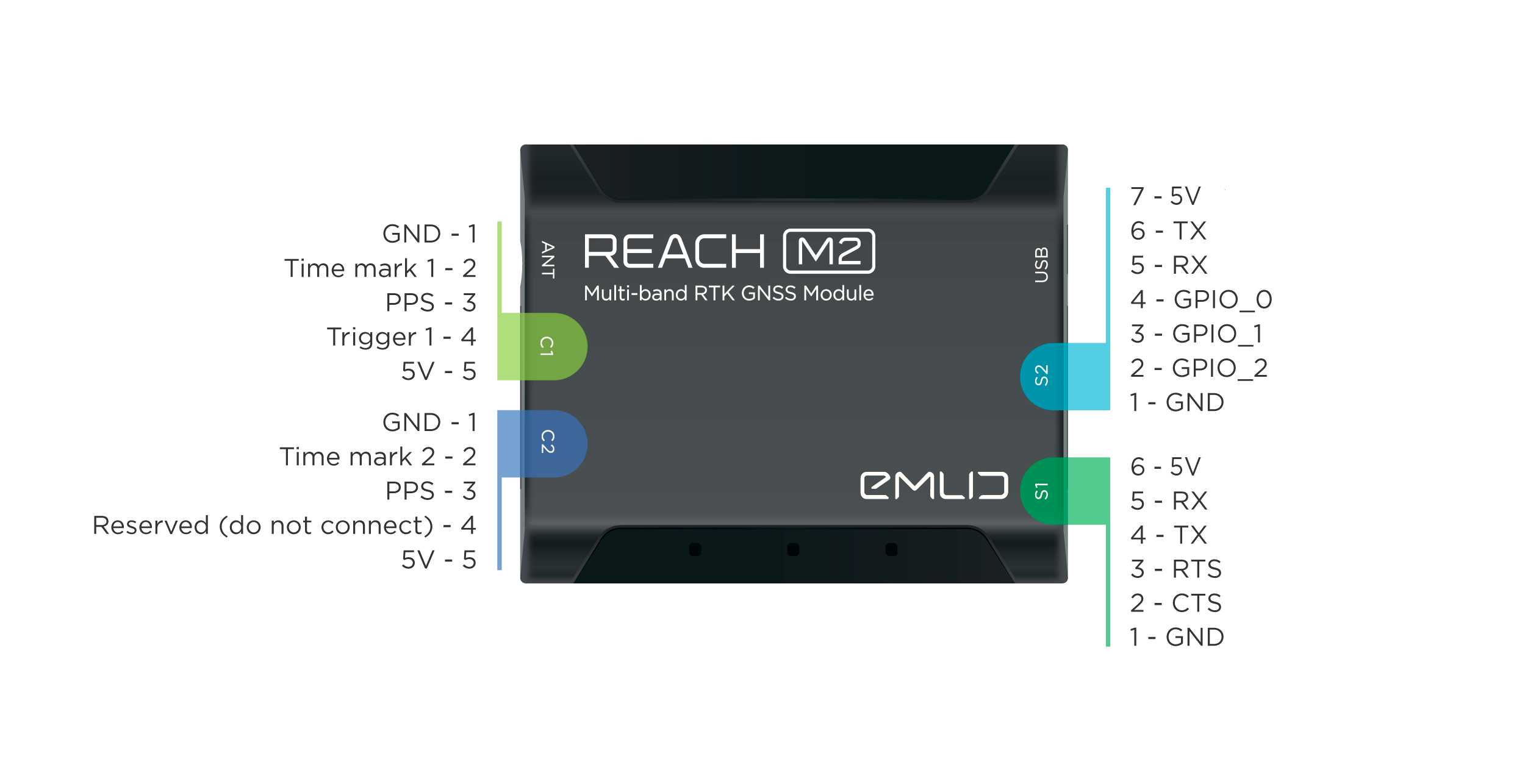
Use C1 port.
No. Use one of them to log event properly. Using both ports will mix up events unless you use more then one camera
M2 detects a rising or falling edge signal.
Be aware, if your device rising or falling edge is slow, M2 might detect this as two events.
I think rise and fall must happen within 250milliseconds or els it will log two events (one fall and one rise)