When I have my FC connected to Mission Planner, I instantly receive all flight data (roll, pitch, yaw angles, velocity, gps location, battery monitor etc).
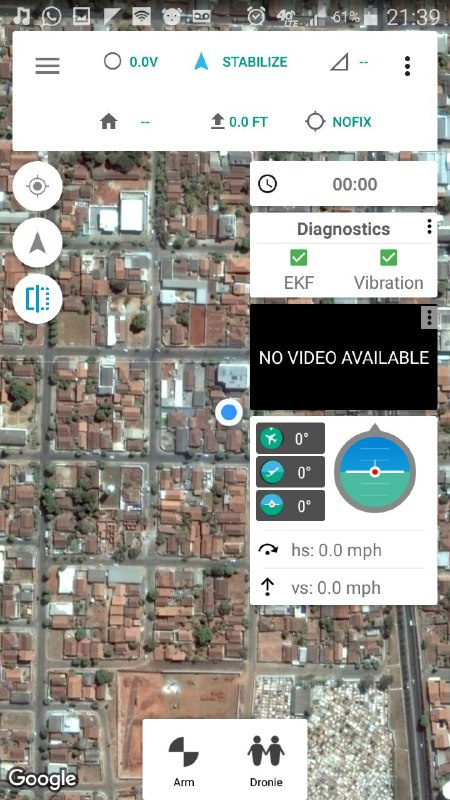
When connected to Tower on Android, however, I can’t seem to receive data from my Navio2. I am connected to it, but I can’t see its angles, gps position or anything.
When pressing “Parameters” on the left menu, I receive a loading notification “Refreshing Parameters” which never leaves 0%.
1.I am using udp. Same as when I connect to mission planner.
2. I did disconnect from mission planner.
3. My navio2 is connected through Android Hotspot.
No, I had only set the first telemetry option with the IP of my phone. Should I set both? Or should I leave the first option as the IP of my PC ground station and the second one with my phone’s?
I just wanted to make sure you changed the setting to your phones IP. It does not matter which telemetry option you use. If you plan to frequently switch between PC and smartphone, it might be easier to use one telemetry option for each.
If you set everything right it should work just as it does with MissionPlanner.
Check the syntax again and/or try to set one option to tcp:0.0.0.0:6000, to use as a universal backup. This should work with smartphone and PC.
#Options to pass to ArduPilot
ARDUPILOT_OPTS="$TELEM1 $TELEM2"
Where 192.168.43.215 is the IP address of my PC and 191.129.1.11 is the address of my Android Smartphone (Samsung galaxy s5).
When connected to Tower, this is my screen:
When only setting one telem option as tcp:0.0.0.0:6000, I was able to successfully connect to mission planner . When disconnected from mission planner and trying to connect to Tower, I get the following error message:
“Connection failed: failed to connect to /192.168.137.23 (port 6000) after 20000ms”
These are the same IP address and port I use when connecting to Mission Planner.
You can not use the -A option two times.
Use -C for telem 2. The different letters are Ardupilots reference to the hardware UARTs a microcontroller based flighcontrol would have. It is all explained in docs.emlid.com
Got it. Still, that doesnt explain why I don’t see flight information on Tower, even when I was enabling only one udp telemetry option.
Also, I have not been able to connect to mission planner or Tower through TCP This is what I have on my copter:
TELEM1="-A tcp:0.0.0.0:6000"
On tower or mission planner, I select the tcp option, push connect and provide my copter’s IP address (acquired through command hostname -I) and port number 6000.
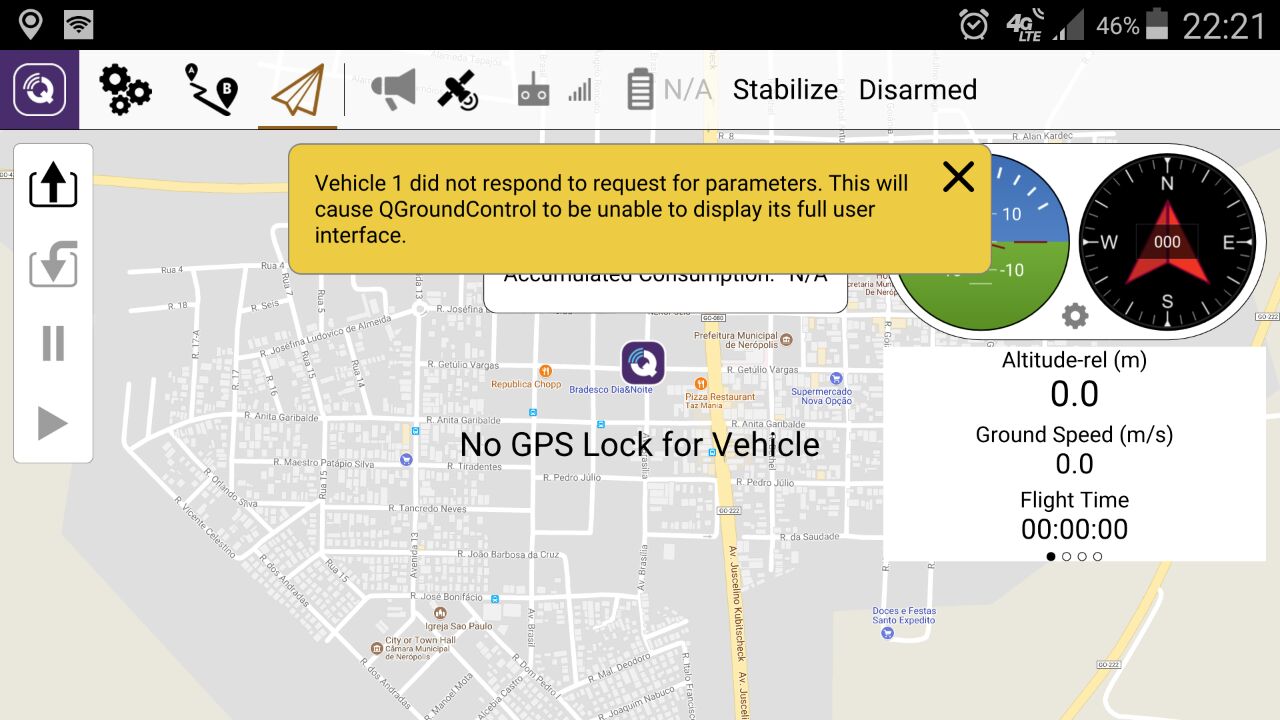
I tried tower today with my rover. I got only limited telemetry in tower, while qgroundcontrol on the same device worked without a problem. I suspect there might be a bug in tower.
Would anyone have an idea on how to solve this? My Navio2 displays a Green LED, which means it has a 3D gps lock. Also, I can see it on Mission Planner’s map.
Also, does QGroundControl support a “follow me” option as well?