we are building a copter and for the past couple of days we had the toilet bowl problem i will share all my flight logs and explain my set up.
at first our drone started to drift away when it is switched to althold or poshold or any mode that is GPS dependent but instead after this modifications the drone started to fly in circles ther was an improvement but we want it to fly smoothly and end the problem.
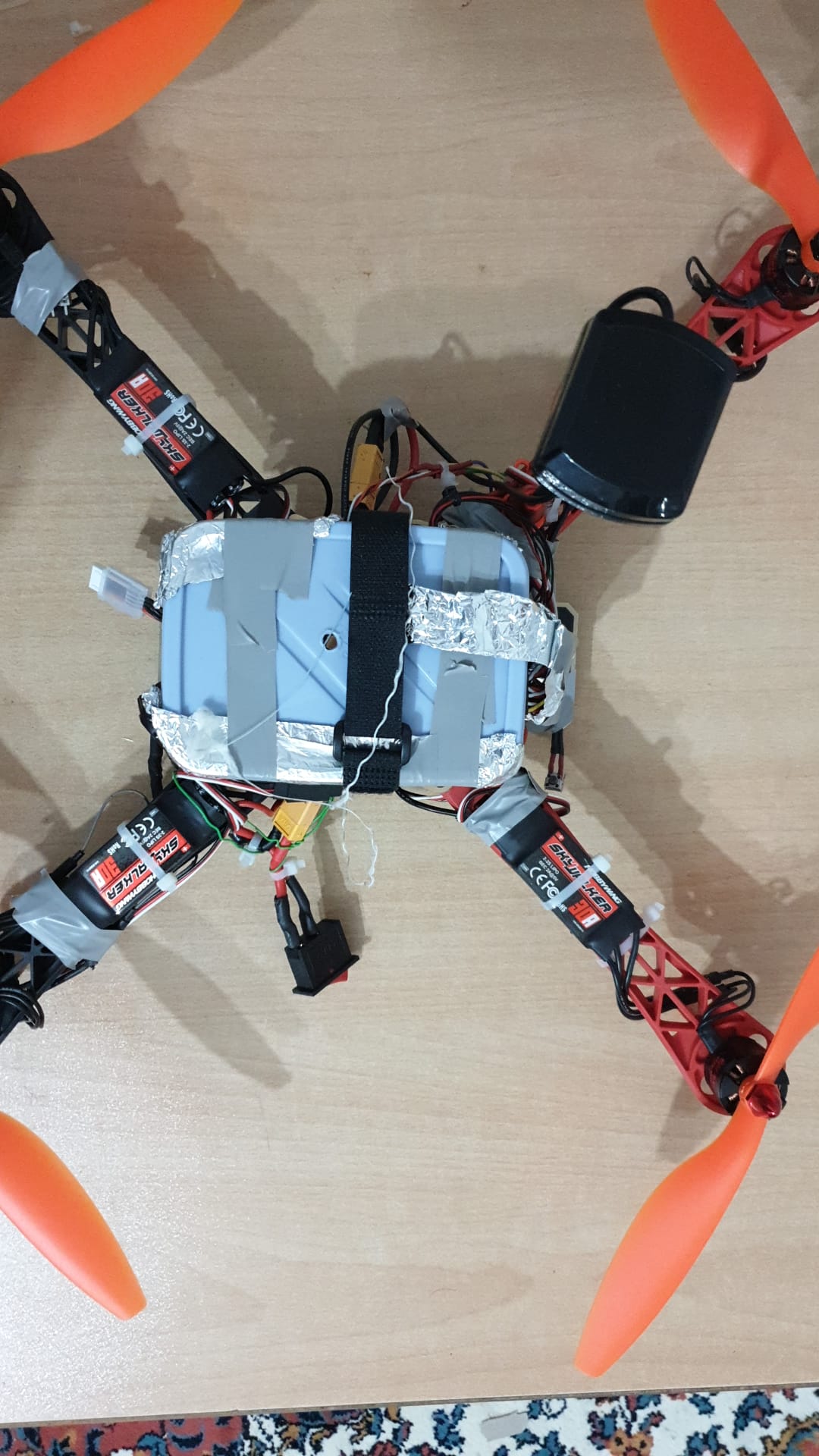
the modifications(we just tried to decrease the magnetic interference):
1-placed all the wires at the farthest place possible from the navio2(near the battery)
2-we placed some aluminum foil(all around the navio2+raspberry) to block any kind of interference to the compass
here is our logs if there is any possible mistakes we overlooked we are happy to hear any kind of feedback.
As I know by reading the ArduPilot forum, a copter shows this behavior when something is wrong with its compass. You should recalibrate your compass in the first place. An area where you perform the calibration can affect the compass. So, please calibrate the compass in the place where you plan to fly with your copter. It should help.
l calibrated the compass ( after we got 3D fix in a clear open area ) but the problem was not solved.
could the problem be because we are only using the navio2 internal GPS and compass ? if it is ,do you have any suggestions on which external unit should we get?
I see that you’re in touch with the other users in this ArduPilot forum thread. I agree with Shawn regarding the wiring rework. This might help here.
As for the Navio2 GPS and compass, they shouldn’t induce such behavior by themselves. Navio2 features NEO-M8N, so you don’t need any other M8N module as was suggested.