



Hello All,
I am seeing an inconsistency in my timestamps between my survey points file, and the logs on my base and rover.
I have recently begun testing the EMLID reach modules, and have a question about applying PPK solutions to my survey points.
As I understand it, applying the post processing only concerns the kinematic data contained in the raw logs on my base and rover. I would like to impose the corrected coordinates on my collected survey points.
To do this I am creating a python program, which uses the timestamps from the survey points and the solution file (after post-processing), extracts and averages the coordinates from the solution file and applies these coordinates to each survey point.
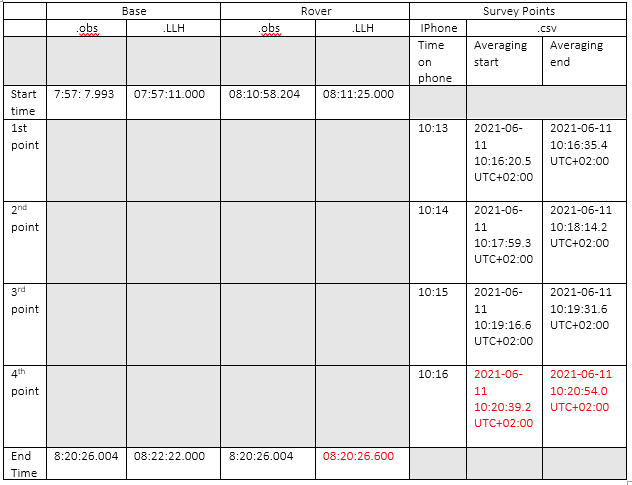
The problem is that the timestamps don’t match
- There is a time zone difference of 2 hours (which I can correct for), this is normal and due to timezone difference.
- There is a difference of up to between 30 seconds and 2 minutes between my survey points times and my rover times (Can’t easily correct for and seems weird!).
Where does this inconsistency come from and how can I fix it?
I conducted a short test collecting 4 points. For this test I stayed in RTK over LoRa.
- Step 1, turn on base and enable data logging
- Step 2, turn on base and enable data logging
- Step 3, begin collecting survey points (4) while walking around campus with rover module. Point collects are a 15-second average.
- Step 4, Return to starting point and turn off rover
- Step 5, Turn off base.
^^Obviously, the end of my last point collect (15 second averaging time) must be within the time of my base rover logs. However, it is not.
Thank you in advance, any advice is appreciated !!
-Zoe
Specs of my set-up :
- 2 Reach RS2 modules set up and base and rover in RTK over LoRa (staying in RTK until I can figure out the timestamp problems)
- ReachView version: v2.24.2
- Survey conducted points collected with the Reachview app on Iphone SE (software version 14.6)
System report base module
:
Simple system report
app version: 2.24.2-r0
'wifi_status, interface: wlan0':
- wifi_mode: ap
- access_point:
band: bg
channel: 1
password: null
ip: 192.168.42.1
is_added: true
is_connected: true
mac_address: 6C:21:A2:BF:B8:22
security: wpa-psk
ssid: baseRS2:B9:9D
uuid: 3e0728f7-bd8c-4355-b9f5-dc29c9286d00
base mode:
base coordinates:
accumulation: 2
antenna offset:
east: '0'
north: '0'
up: 0.0
coordinates:
- 45.199198694300001
- 5.7733019131700001
- 263.435
format: llh
mode: manual
output:
air_rate: 18.23
enabled: true
frequency: 870000
io_type: lora
output_power: 20.0
rtcm3 messages:
'1006':
enabled: true
frequency: 0.10000000000000001
'1074':
enabled: true
frequency: 1.0
'1084':
enabled: true
frequency: 1.0
'1094':
enabled: true
frequency: 1.0
'1124':
enabled: true
frequency: 1.0
bluetooth:
discoverable: true
enabled: true
pin: '***'
constraints:
lora:
frequency:
- - 863000
- 870000
correction input:
input2:
baud_rate: 38400
device: UART
enabled: false
io_type: serial
send_position_to_base: false
device:
night_mode: false
power_on_bottom_connector: false
privacy_policy_accepted: true
usage_analysis_accepted: false
logging:
base:
format: RINEX
started: false
version: '3.03'
correction:
format: null
started: null
debug: false
interval: 24
overwrite: true
raw:
format: RINEX
started: false
version: '3.03'
solution:
format: LLH
started: false
lora:
air rate: 18.23
frequency: 870000
output power: 20.0
network:
tcp_over_modem: false
position output:
output1:
baud_rate: 38400
device: UART
enabled: false
format: ERB
io_type: serial
output2:
baud_rate: 38400
device: UART
enabled: false
format: ERB
io_type: serial
rtk settings:
elevation mask angle: 15
glonass ar mode: 'off'
gps ar mode: fix-and-hold
max horizontal acceleration: 1.0
max vertical acceleration: 1.0
positioning mode: static
positioning systems:
compass: true
galileo: true
glonass: true
gps: true
qzss: false
snr mask: 30
update rate: 1
sound:
mute: false
volume: 100
System Report Rover Module:
Simple system report
app version: 2.24.2-r0
'wifi_status, interface: wlan0':
- wifi_mode: ap
- access_point:
band: bg
channel: 1
password: null
ip: 192.168.42.1
is_added: true
is_connected: true
mac_address: C0:84:7D:27:F2:2F
security: wpa-psk
ssid: roverRS2:66:AB
uuid: 572e66f1-8448-4ee5-aa55-ff31ecbc2839
base mode:
base coordinates:
accumulation: 2.0
antenna offset:
east: '0'
north: '0'
up: '0'
coordinates:
- 0
- 0
- 0
format: llh
mode: float-and-hold
output:
baud_rate: 38400
device: UART
enabled: false
io_type: serial
rtcm3 messages:
'1006':
enabled: true
frequency: 0.10000000000000001
'1074':
enabled: true
frequency: 1.0
'1084':
enabled: true
frequency: 1.0
'1094':
enabled: true
frequency: 1.0
'1124':
enabled: true
frequency: 1.0
bluetooth:
discoverable: false
enabled: false
pin: '***'
constraints:
lora:
frequency:
- - 863000
- 870000
correction input:
input2:
air_rate: 18.23
enabled: true
frequency: 870000
io_type: lora
output_power: 20.0
send_position_to_base: false
device:
night_mode: false
power_on_bottom_connector: false
privacy_policy_accepted: true
usage_analysis_accepted: true
logging:
base:
format: RTCM3
started: false
correction:
format: RTCM3
started: true
debug: false
interval: 24
overwrite: true
raw:
format: RINEX
started: false
version: '3.03'
solution:
format: LLH
started: false
lora:
air rate: 18.23
frequency: 870000
output power: 20.0
network:
tcp_over_modem: false
position output:
output1:
baud_rate: 38400
device: UART
enabled: false
format: ERB
io_type: serial
output2:
baud_rate: 38400
device: UART
enabled: false
format: ERB
io_type: serial
rtk settings:
elevation mask angle: 15
glonass ar mode: 'off'
gps ar mode: fix-and-hold
max horizontal acceleration: 1.0
max vertical acceleration: 1.0
positioning mode: kinematic
positioning systems:
compass: true
galileo: true
glonass: true
gps: true
qzss: false
snr mask: 35
update rate: 5
sound:
mute: false
volume: 100