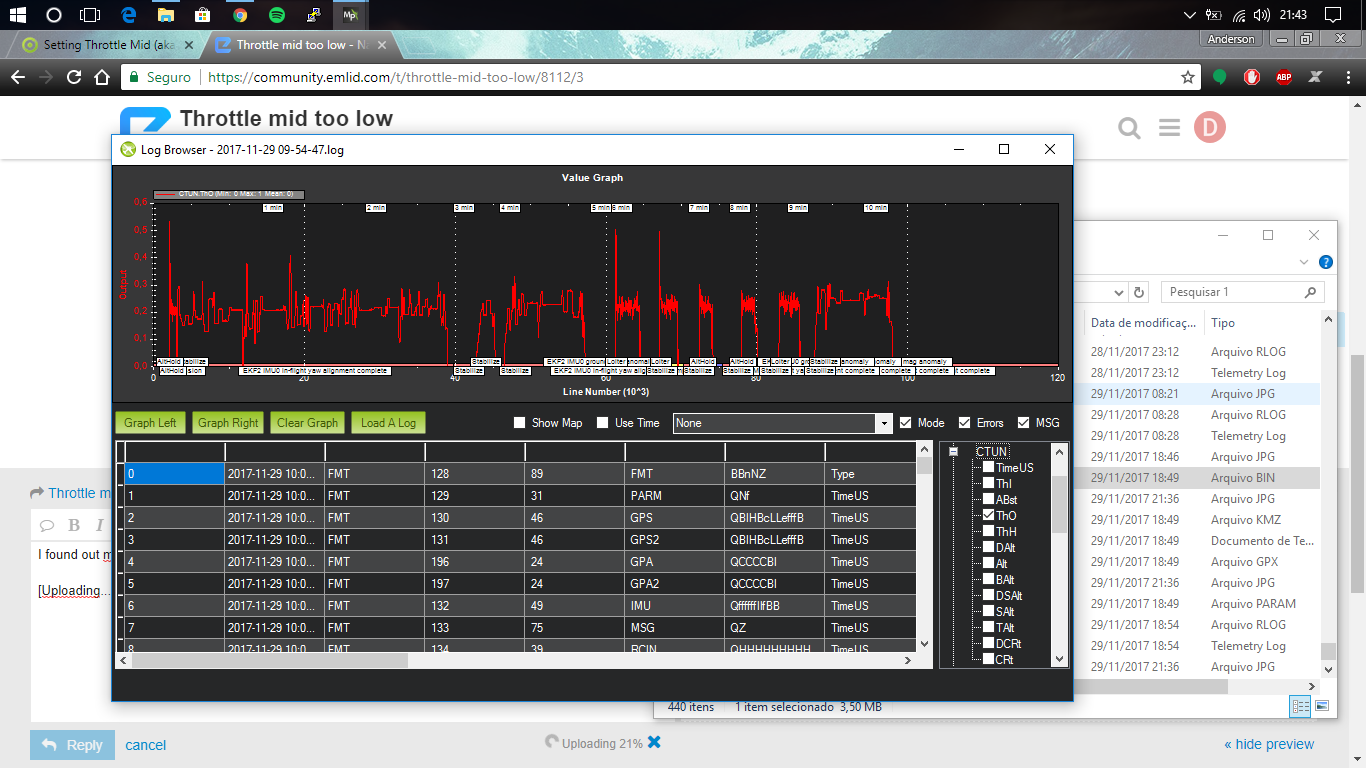
We can see my hover throttle is around 0.2, or 20%.
The ardupilot page instructions, however, state that it one’s hover throttle is less than 30%, one should probably add some weight to it or change its motors. However, I am unable to do this at this moment, since I don’t have the time to adjust new components to it and do not have other motors or batteries.
Should I change the throttle mid position parameter to 0.20? What does that impact on flying performance?