



Before creating a new thread please refer to Quickstart guides for Reach and Reach RS.
In case you are creating a thread about an issue it is necessary to provide following information to get help:
-
Firmware image and ReachView version.

Simple system report
app version: 28.4-r0
current_network:
ip: 192.168.0.110
security: wpa-psk
ssid: TP-Link_1126
enabled: true
mode: client
base_mode:
base_coordinates:
accumulation: 126
mode: single-and-hold
output:
io_type: 'off'
settings:
cloud:
mount_point: ''
lora:
air_rate: 18.23
frequency: 903500
output_power: 20
ntripcaster:
mount_point: REACH
password: '***'
port: 2101
username: reach
ntripsvr:
address: caster.emlid.com
mount_point: MP4517
password: '***'
port: 2101
serial:
baud_rate: 38400
device: ttyEXTS0
tcpcli:
address: localhost
port: 9001
tcpsvr:
port: 9000
rtcm3_messages:
message_1004:
enabled: false
frequency: 1
message_1006:
enabled: true
frequency: 0.1
message_1008:
enabled: false
frequency: 0.1
message_1012:
enabled: false
frequency: 1
message_1033:
enabled: false
frequency: 0.1
message_1074:
enabled: true
frequency: 1
message_1084:
enabled: true
frequency: 1
message_1094:
enabled: true
frequency: 1
message_1124:
enabled: true
frequency: 1
message_1230:
enabled: false
frequency: 0.1
bluetooth:
enabled: false
pairing:
discoverable: false
no_input_no_output: false
pin: '***'
correction_input:
base_corrections:
io_type: lora
settings:
bluetooth:
send_position_to_base: false
cloud:
mount_point: ''
send_position_to_base: true
lora:
air_rate: 18.23
frequency: 903500
output_power: 20
send_position_to_base: false
ntripcli:
address: ''
mount_point: ''
password: '***'
port: -1
send_position_to_base: true
username: ''
serial:
baud_rate: 38400
device: ttyEXTS0
send_position_to_base: false
tcpcli:
address: localhost
port: 10001
send_position_to_base: true
tcpsvr:
port: 10000
send_position_to_base: true
device:
power_on_bottom_connector: false
privacy_policy_accepted: true
role: null
rv3_banner_shown: false
usage_analysis_accepted: true
logging:
logs:
base:
autostart: false
format: RTCM3
started: false
raw:
autostart: false
format: RINEX
rinex_options:
logging_interval: 30
marker_name: Centro
pole_height: 1.14
preset: custom
satellite_systems:
beidou: false
galileo: true
glonass: true
gps: true
qzss: false
sbas: false
time_adjustments_enabled: false
started: false
version: '2.11'
solution:
autostart: false
format: LLH
started: false
settings:
debug: false
interval: 24
overwrite: true
simultaneous_logging: false
network:
tcp_over_modem: false
position_output:
output1:
io_type: bluetooth
nmea_settings:
bluetooth:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
serial:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpcli:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpsvr:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
settings:
bluetooth:
format: NMEA
serial:
baud_rate: 38400
device: ttyEXTS0
format: ERB
tcpcli:
address: localhost
format: ERB
port: 9000
tcpsvr:
format: LLH
port: 9001
output2:
io_type: tcpsvr
nmea_settings:
bluetooth:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
serial:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpcli:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpsvr:
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
settings:
bluetooth:
format: NMEA
serial:
baud_rate: 38400
device: ttyEXTS0
format: ERB
tcpcli:
address: localhost
format: ERB
port: 9000
tcpsvr:
format: LLH
port: 9001
positioning_settings:
elevation_mask_angle: 15
glonass_ar_mode: false
gnss_settings:
positioning_systems:
beidou: false
galileo: true
glonass: true
gps: true
qzss: false
update_rate: 1
gps_ar_mode: fix-and-hold
max_horizontal_acceleration: 1
max_vertical_acceleration: 1
positioning_mode: kinematic
snr_mask: 35
sound:
mute: false
volume: 100
- Detailed problem description. How does observed behavior differ from the expected one?
When I open up RTKplot with the .pos file and look at the statistics at the top right corner, the RMS shows at 334,118 meters. I processed this result in static mode with a base station that was several kilometers away so the only explanation I can think of is that RTKplot is using also using the base coordinates to calculate the RMS, but I’m not sure. If it is what I think, how can I take those coordinates out of the equation? so that I have an accurate way of assessing the precision of my results.
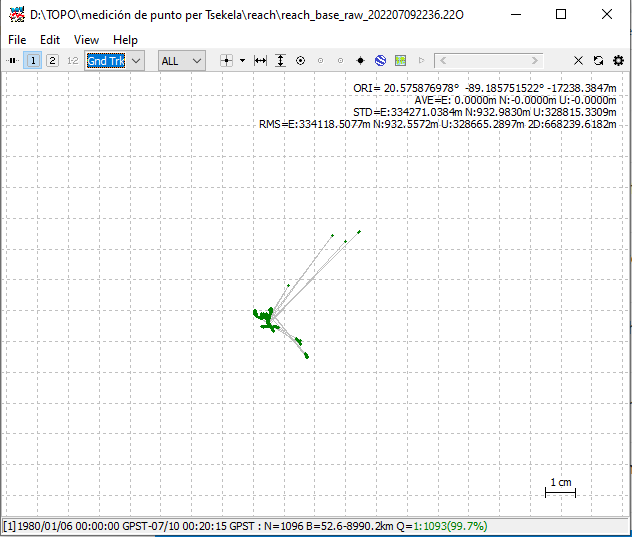
Also, I don’t know if I moved something I shouldn’t have in the settings, but every time I open the pos file it is showed really zoomed out. Like this:
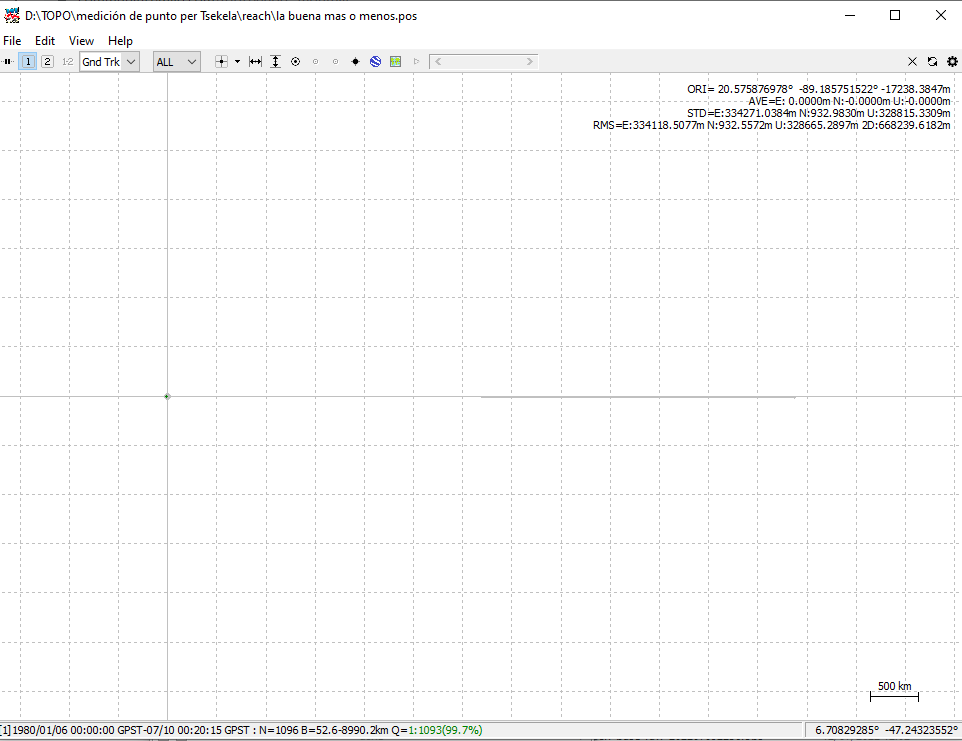
It’s not a big problem, but I would prefer it if it were already zoomed into the points like the first photo? Are there some settings I could use to always open the file that way?
Lastly, I would appreciate it if you could tell me about the different options I have to assess the precision of static measurements derived from emlid studio or RTKlib.
- Your step by step actions.
- Picture of the setup and connection scheme.
- If you are reporting an issue with solution, please provide RTKPLOT of observations from rover and base (with all the systems enabled and LLI flag for cycle slips). Instructions can be found here.
- Attach RINEX log files for rover and base. If you prefer to keep them confidential, you can email the files to support@emlid.com with a link to the thread. Please note, that in this case, other community members will not be able to help you.