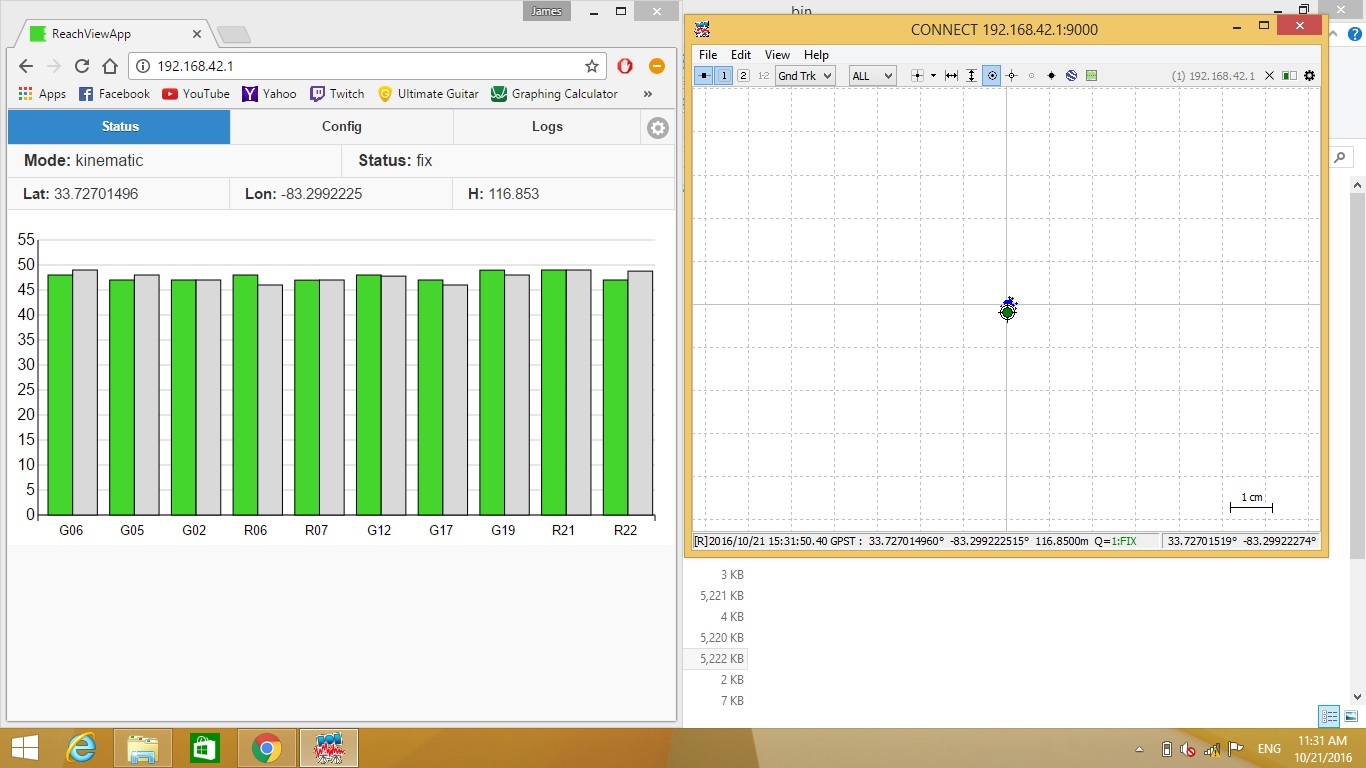
And after I put the rover in a place for a while, it went back to FIX status.
For me I want to mount the GPS on a robot, and then get its position information when the robot is running. Now it seems like the GPS can not get FIX status for dynamic situation.
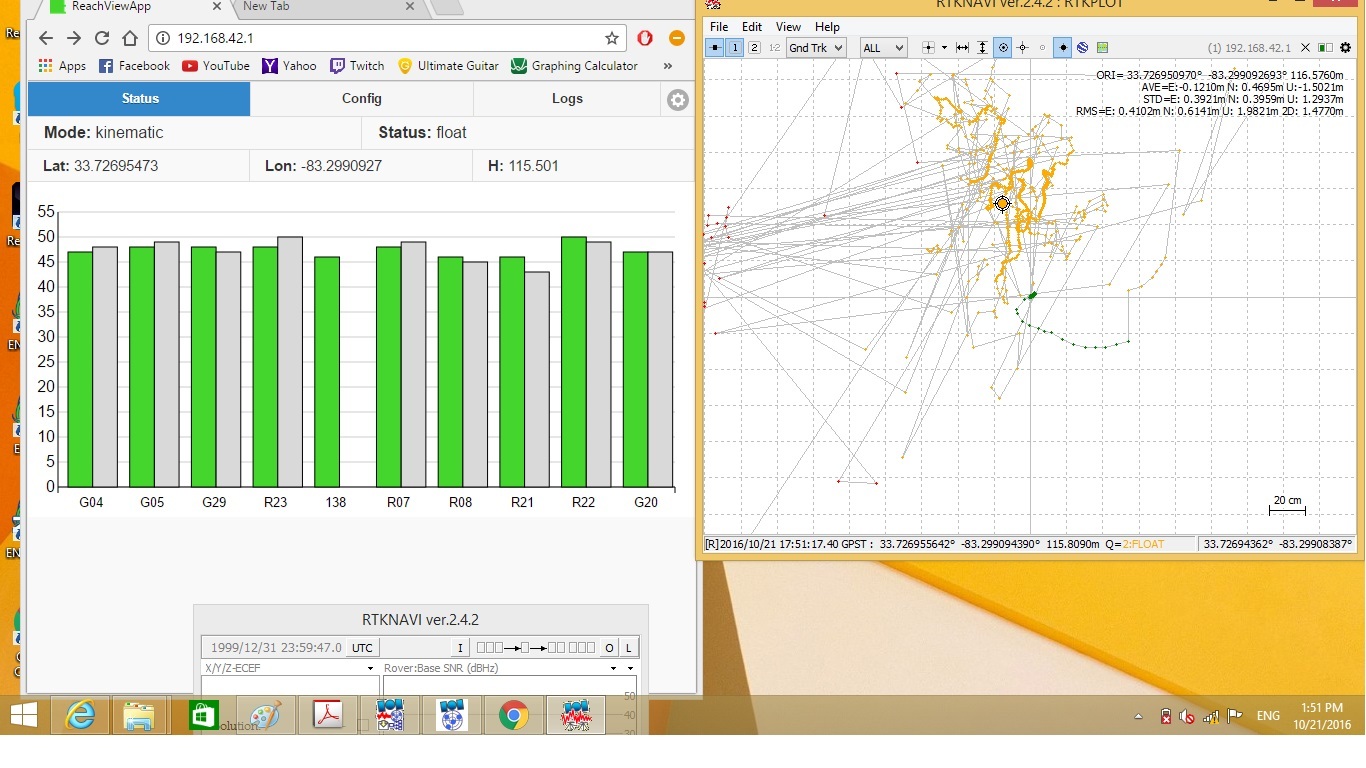
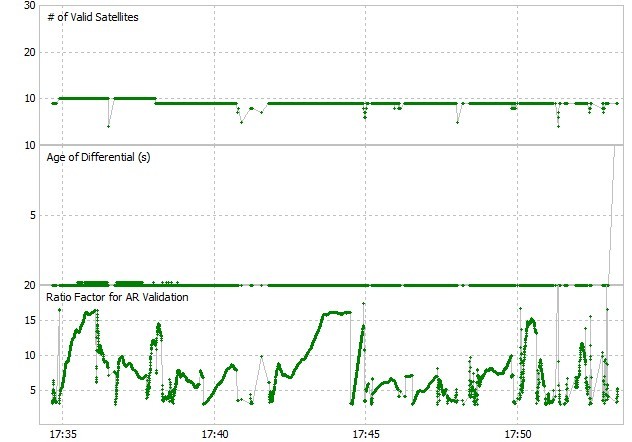
A quick look at the post file, it look ok with 82% FIX solution
Could you tellus a bit more what you were doing when logging this file? walking with a pole or others…
You got som fluctuation with AP. I will take a closer look later.
My ReachView version is v0.4.9.
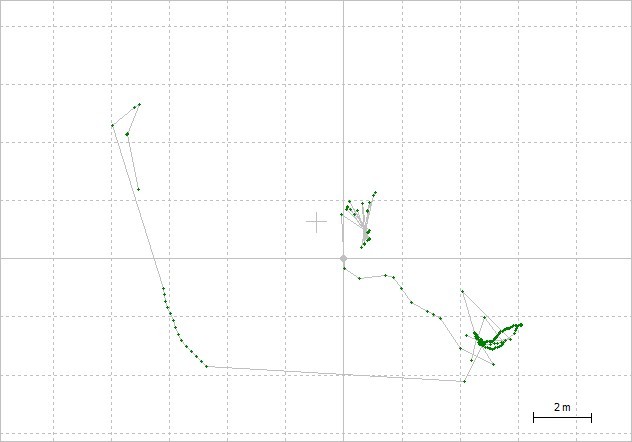
I thought I was just moving the rover by hand when logging the file,and the base was static. I put the the rover in a plastic plate, as shown in the following figure.
I assume you have a metal ground plate under the antenna? Also retry with a longer vertical distance (50cm or more) between the antenna and the equipment. You could have some interference from it.
I’m not sure whether there is metal underground, I will switch another place to test it again. I stick the antenna to a metal plate, shown as in the figure I posted just now, the antenna was put in the up left corner. is it the reason?
Did you do post processing for the 92% FIX status. Since during my test, once I moved the rover, the gps switched to FLOAT status, and when I put the rover in a fixed place, several seconds later, it went back to the FIX status. I would like to mount the gps on a robot, and let robot run in the field, so what I want to achieve is the GPS can maintain FIX status when my robot is moving.