



Hi people, this might be a stupid question: What is the correct way of connecting ESC heads to Navio2 for a quadcopter?
In Navio2 docs ->> Hardware setup ->> RC output ->> ESCs, it says, “Only one ESC power wire (central) should be connected to Navio2 servo rail, otherwise BECs built in ESCs will heat each other.” And the scheme shows so.
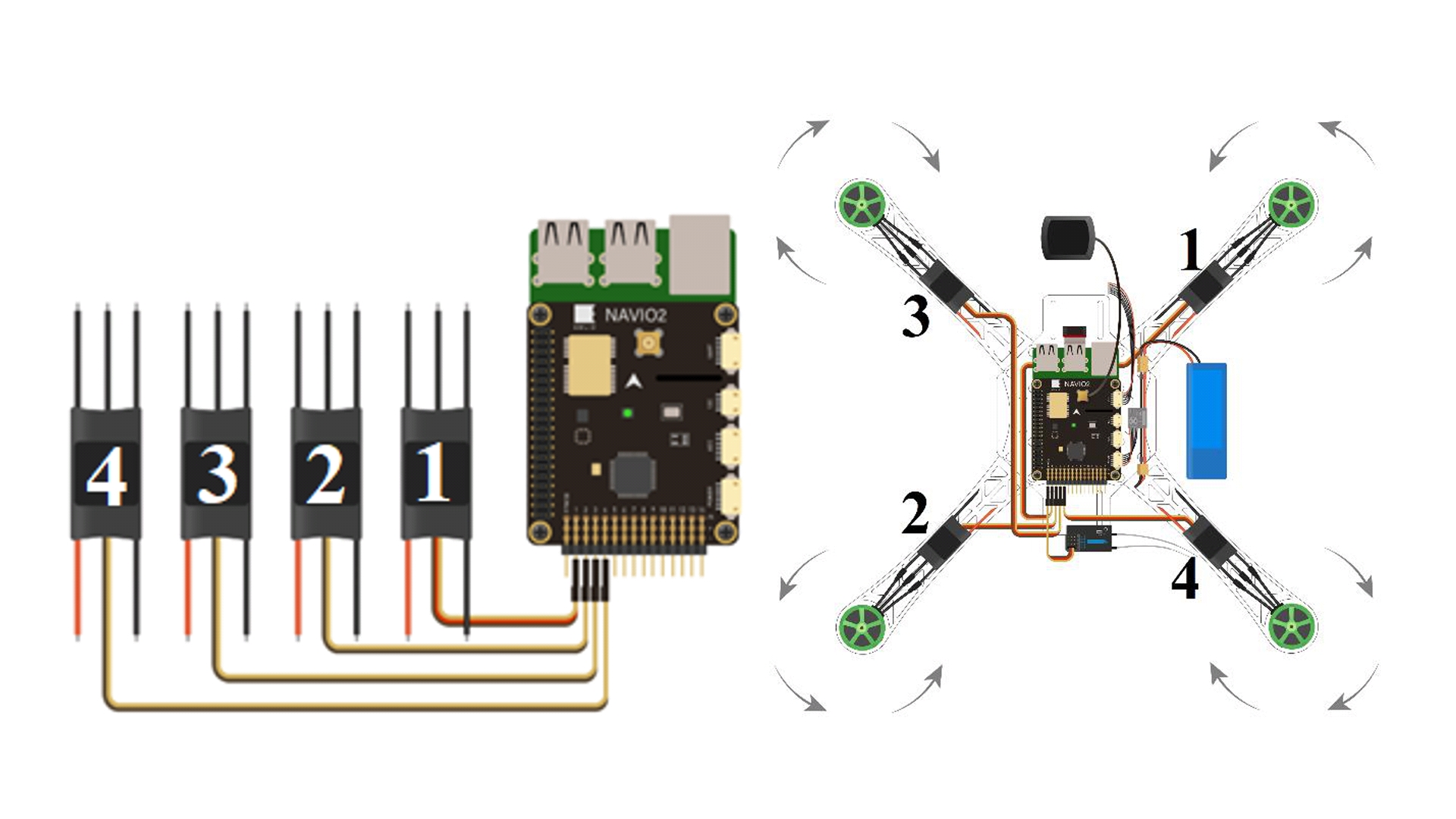
However, in Navio2 docs ->> ArduPilot ->> Typical setup schemes ->> Quadcopter setup, this scheme shows that all four power lines are connected to Navio2.
Are they different things (first one is for servo, and the second is for quadcopter)? Which scheme should I follow when I build a quadcopter?
I am following the second one to build my quadcopter but now I am having problems with ESC Calibration in Mission Plannner, and I am not sure if I was wrong at the very beginning.
Thank you!
You don’t even need any esc powerline unless you will use servos with your quad . But connect only 1 of the 4 even if you’re not using servos , it will act as a back-up power supply for navio in case of power module failure . Don’t connect all 4 because as mentioned it will cause BECs to heat each other . Also the connection should be in order as in the picture
{kind=link}
{kind=link}
Cheers Moe! I have cut the other three power lines following your explanation. Hopefully now the ESC Calibration will be fine.
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.