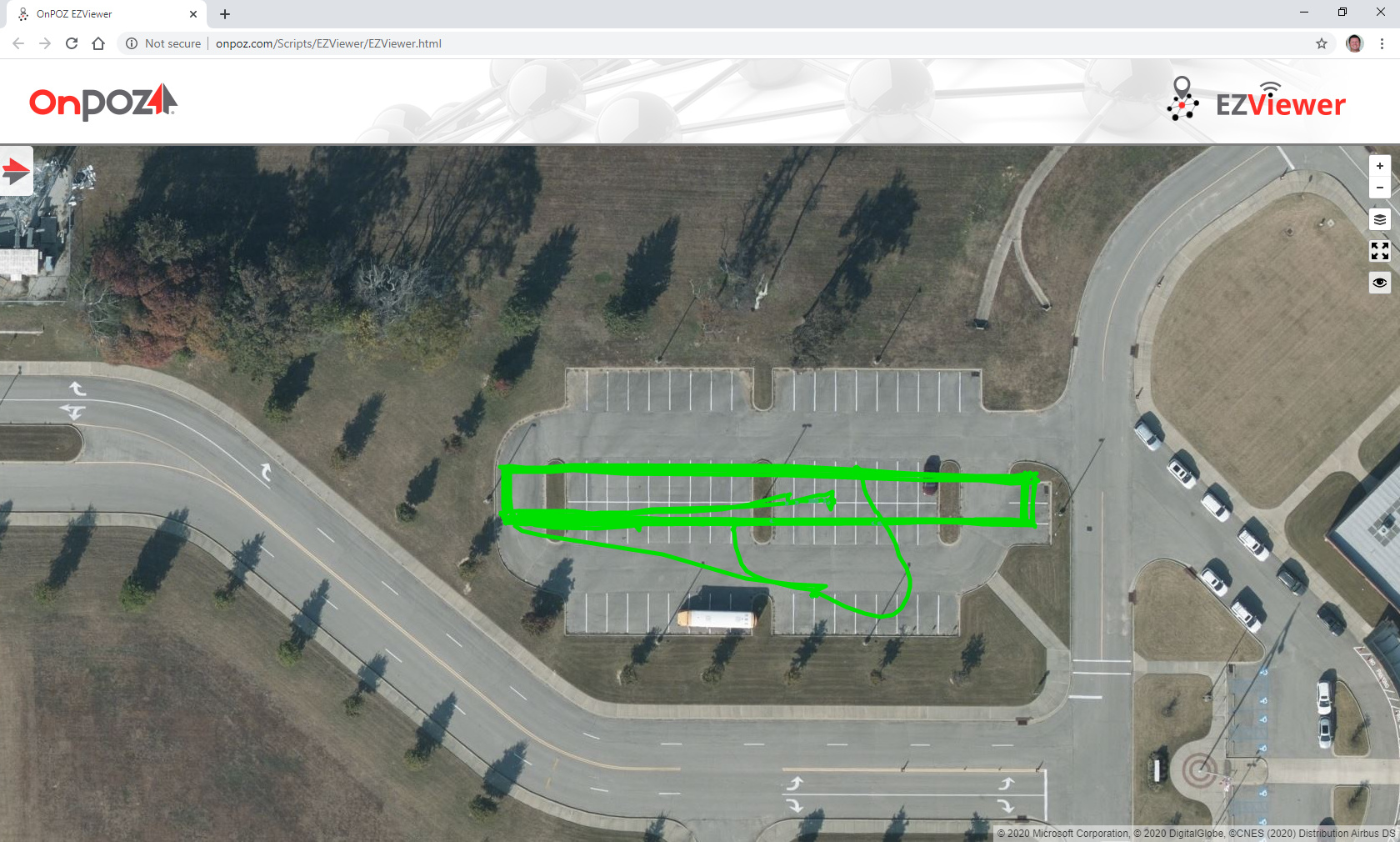
I have been wanting to test the M+ accuracy for the PPK setup so I gave it a go. I setup Litchi to fly back and forth over a parking lot. I surveyed the stripes on the parking lot (center line and every other stripe). With the M+ mounted I just manually took photos as the P4P flew over the stripes.
The purpose was to take the center pixel of the image and compare that to the PPK value.
I also wanted to test various timing offsets and try to find the absolute most accurate over a whole set of photos. All photogrametry software takes the yaw, pitch, and roll of gimbal into the calculations when stitching. But for the purpose to “testing the accuracy”, I need to have a formula that will show me where the PPK value “should be” and then I can compare that to where it is.
Steps So Far:
- Flew mission in Litchi with Camera set to 90°
- After surveying the parking lot stripes, I entered that into software in UTM 16N.
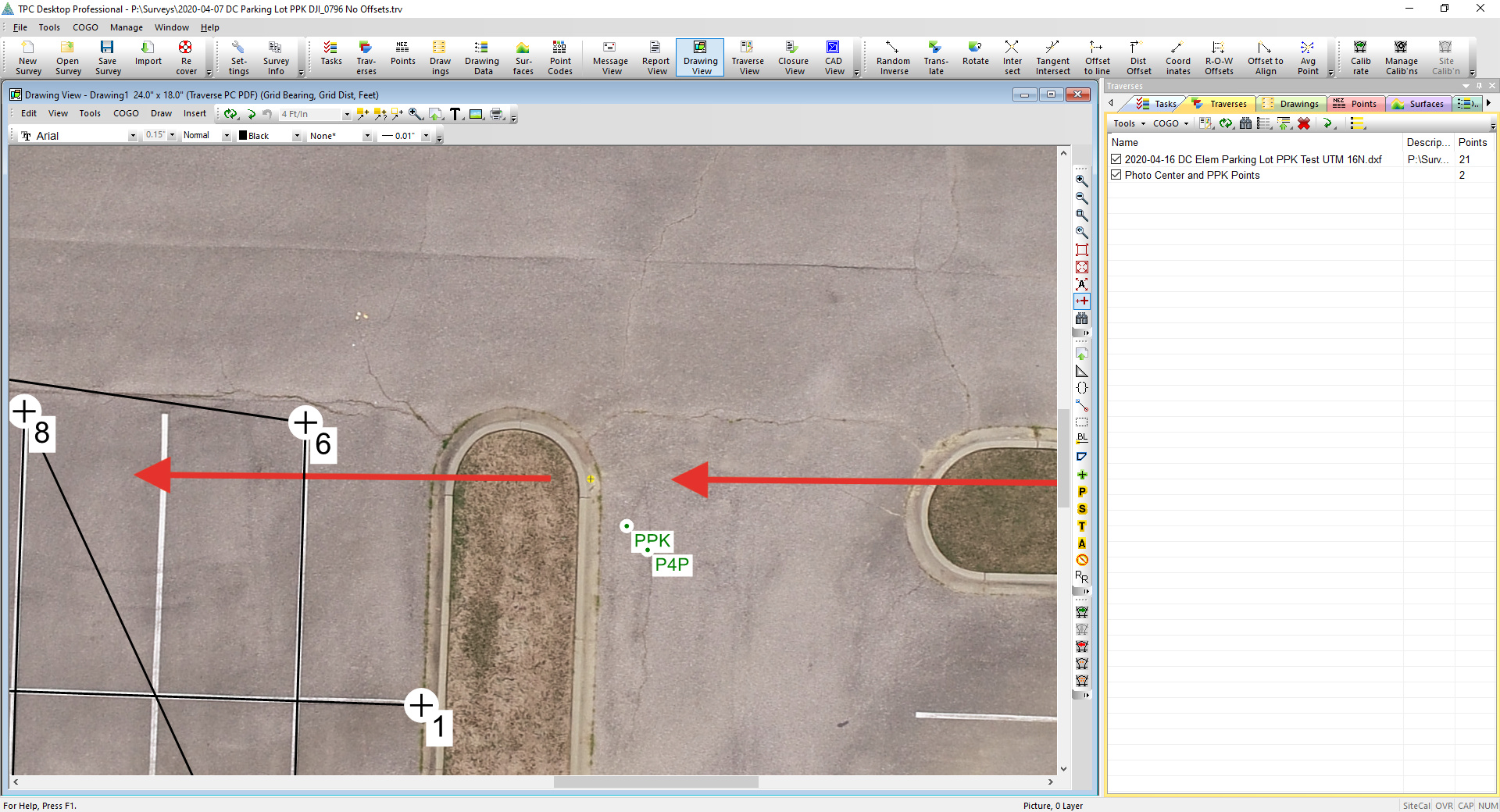
- I took the P4P photos and marked the very center pixel for a reference
- I brought the photo into TPC and calibrated the image to the drawing so that it was geographically placed correct.
- I then processed the M+ flight and entered the location on the image.
What I need help with is having the correct math formula to account for the yaw, pitch, and roll of the camera/gimbal when the photo was taken. It will slightly different for each photo.
If I have the center point of the photo, and the PPK location of the M+, then we should be able to mathmatically take the yaw, pitch, and roll values along with the altitude to triangulate back to the center point of the photo. The difference in the calculated point and the actual point should show the accuracy. In the attached image, you see the image center point, and the locations for the P4P onboard gps (original photo gps) and the PPK location of the M+.
But I don’t know how to come up with the formula. Can anyone help with that? Or if my thought process is wrong, let me know that too.