I have begin to play with reachRTK kit, current setup as following (RFD900+ radios are off-the-shelf but will use them after finishing with network tests) but having problems as detailed below :
- Modem/AP IP : 192.168.1.1
- Rover : 192.168.1.211
- Base : 192.168.1.176
- Reach Image : v1.2
- ReachView : v0.4.9
I setup Base with the following parameters :
output path for corrections : tcpsvr
port : 9000
output format : rtcm3
rtcm3 messages for output : 1002,1006,1010,1019
base latitude : 0 (wanted to give zero for tests because exact coordinates are unknown)
base longitude : 0 (wanted to give zero for tests because exact coordinates are unknown)
base height : 10 (wanted to give ten for tests because exact height is unknown)
option : GPS_1Hz.cmd
saved and started, there is nothing appearing on status screen, mode says base and status says started, nothing else.
and Rover configured as following :
positioning mode : kinematic
used positioning systems : gps,sbas,glo,gal
dynamics model of the rover (kinematic and dgps only) : off
u-blox configuration file : GPS_1Hz
input source for base corrections : tcpcli
ip : 192.168.1.176
port : 9000
input format for base corrections : rtcm3
solution 1 output path : tcpsvr
port : 9001
solution 1 output format : nmea
solution 2 output path : bluetooth
solution 2 output format : nmea
raw data log for onboard receiver : off
raw data log for base corrections : off
base antenna coordinates : rtcm
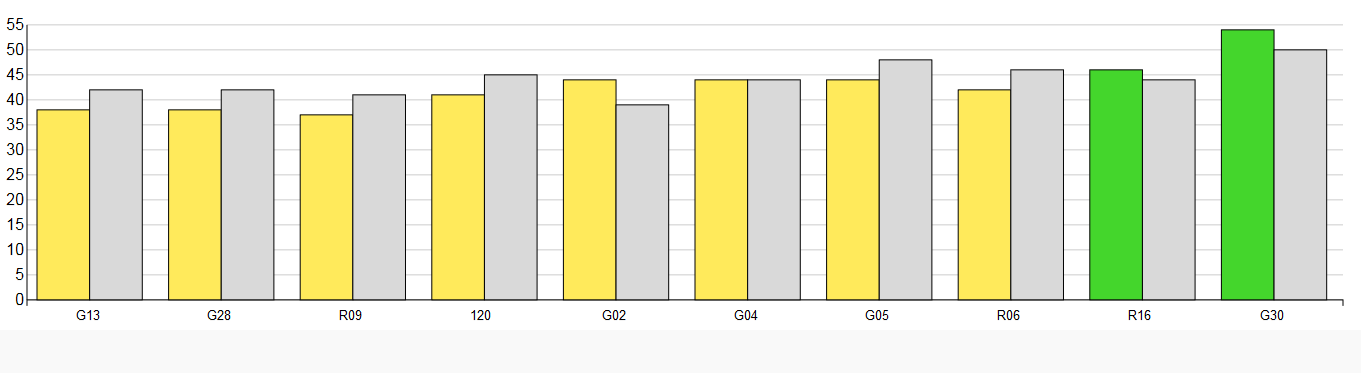
the rest of settings are defaults (never changed anything in advanced menu), saved and started, the idea is to have nmea data both on tcp and bluetooth to test with different connections. on status screen i see mode : kinematic, status : single, lat and lon and height gives coordinates and height but they are not fixed with some value. also notice yellow, red and green bars with grey bars close to them, which i understand that they are from base station. waited for a long time to get fix but nothing changes.
my question is whether above settings are correct for communicating between a LAN ? And do i need to expect some coordinates on status screen of base station ?