



Hello all,
I’m using Navio2+RPi3 for my autonomous plane project. RPi 3 runs the latest version of ArduPlane (3.6.0) and uses a USB telemetry radio for communication with GCS. This command runs the APM:
sudo ArduPlane -C /dev/ttyUSB0 -B /dev/ttyAMA0
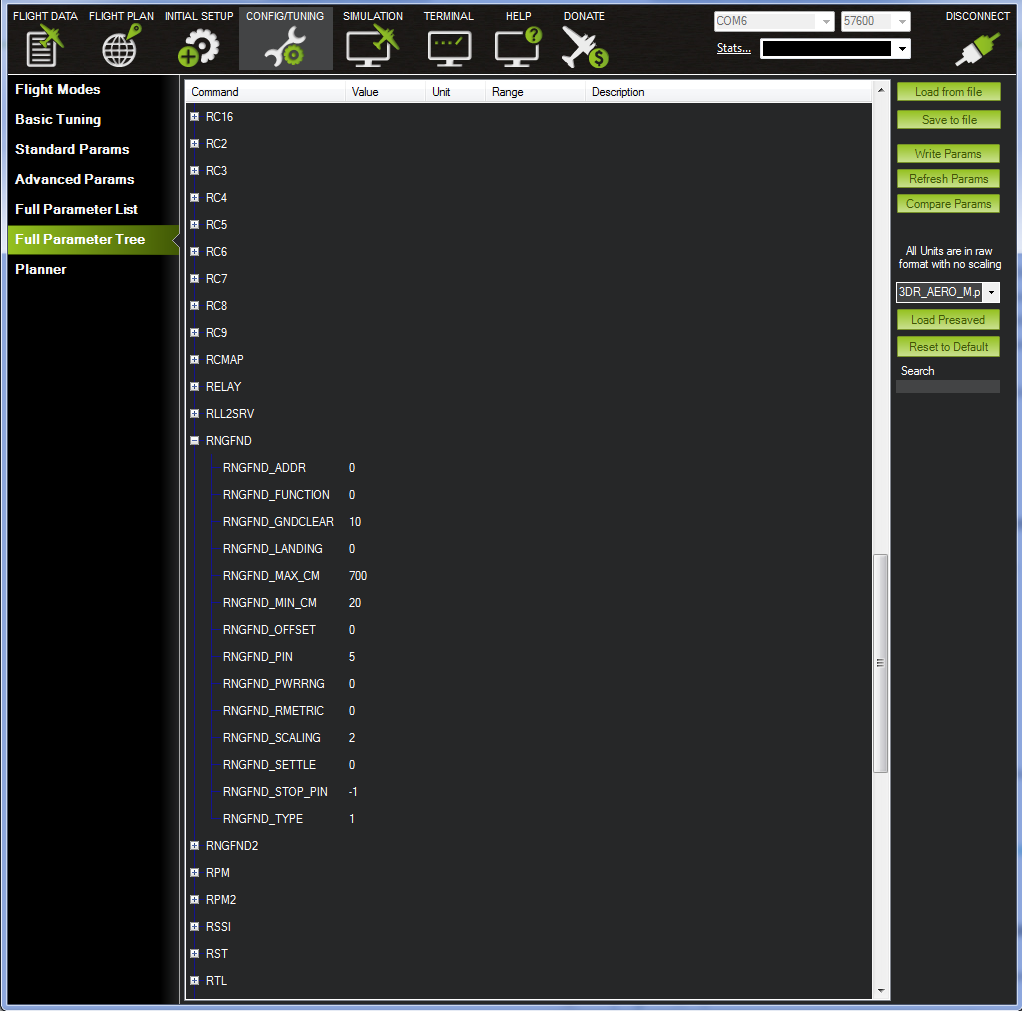
The parameters I use for sonar integration is given below.
The Mission Planner, which runs on the GCS computer, has the version 1.3.39. The total system runs as expected, as you can see the HUD of Mission Planner below. Note that sonar values are zero due to temporary disconnection while taking the screenshot, I’ve read different values of those before.
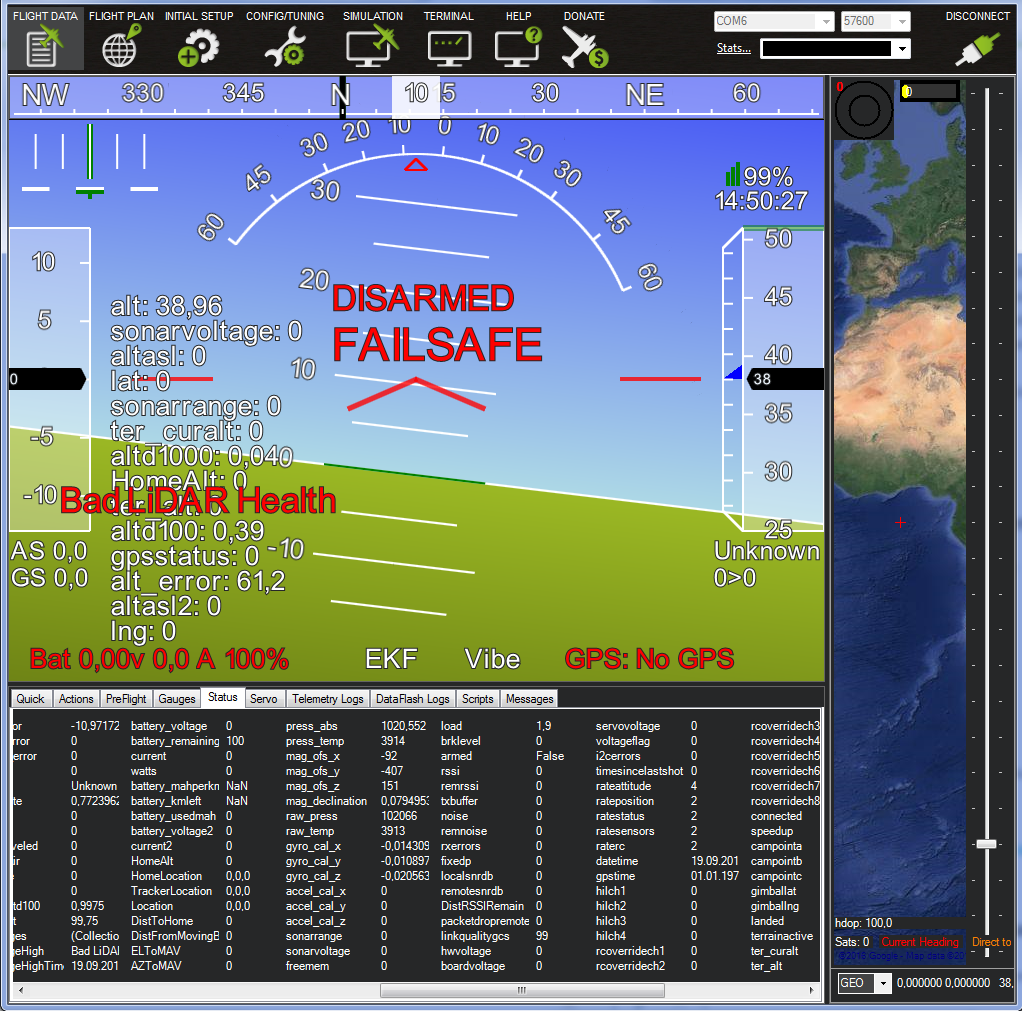
I’d like to read two values from Mission Planner (namely sonarrange and sonarvoltage) and carry them to a third-party application, for example Matlab. I wonder whether anyone has ever tried to do this here.
Any help is welcome.