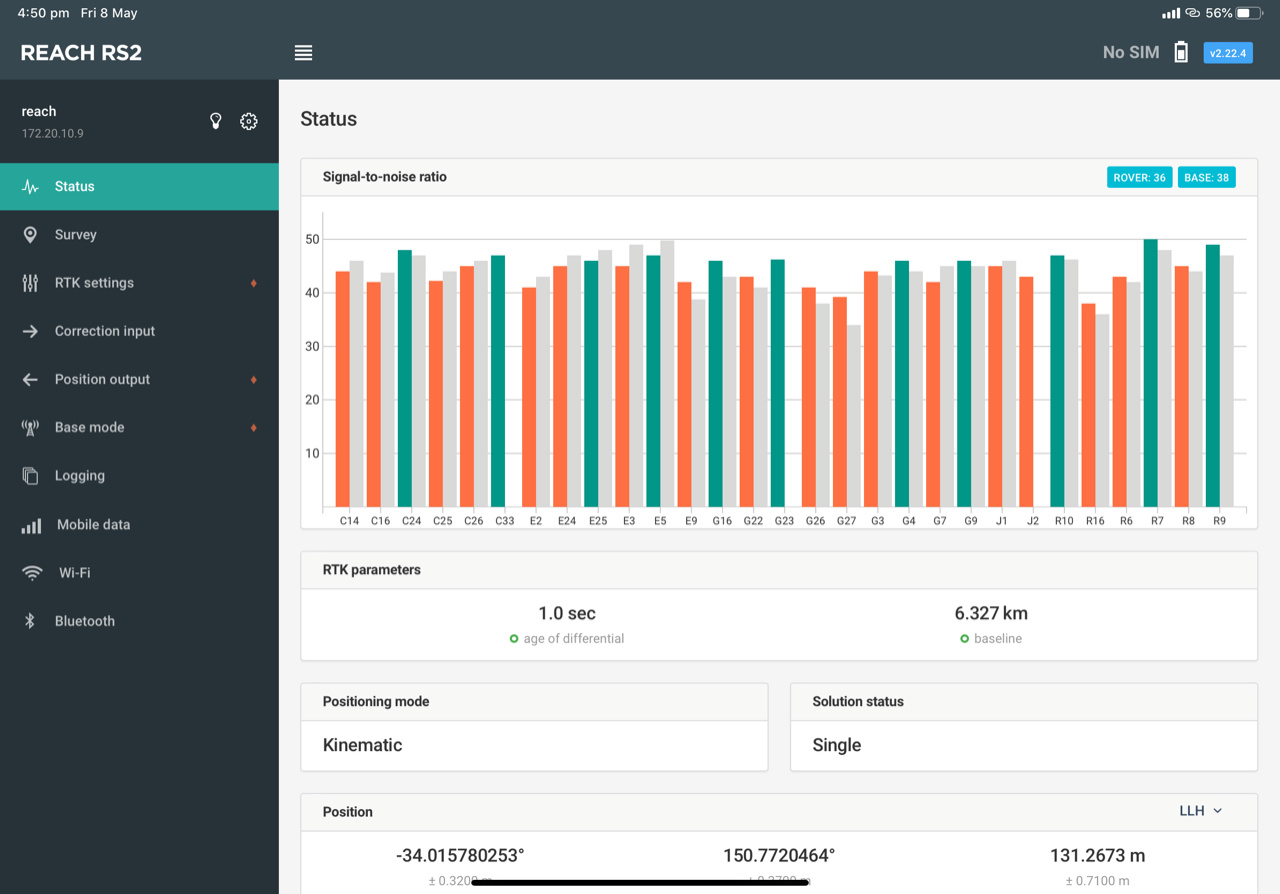
When connected to NTRIP (base station 6km away, corrects for multiple frequencies), I was surprised at the trouble I had getting a fix (rover had 32 sats, base had 38).
I waited over 20 minutes with no luck.
Then I started turning things on and off, experimenting a bit, and in the same location, after turning things on and off, I got a fix within 10 seconds. But if I tipped the rover over and back up, it then struggled for another ~15 mins.
This was connected to an ipad. So I switched to my iphone and it fixed within 10 seconds. If I tipped the rover over and back up, the fix was found very quickly 4 times. Then the 5th it was lost and didn’t come back.
I never saw float, it was either single, or fixed.
Is it preferred/much more stable to have the sim in the RS2, rather than hot-spotting from my ipad/phone?
I also changed Mount points and the same behaviour occurred.
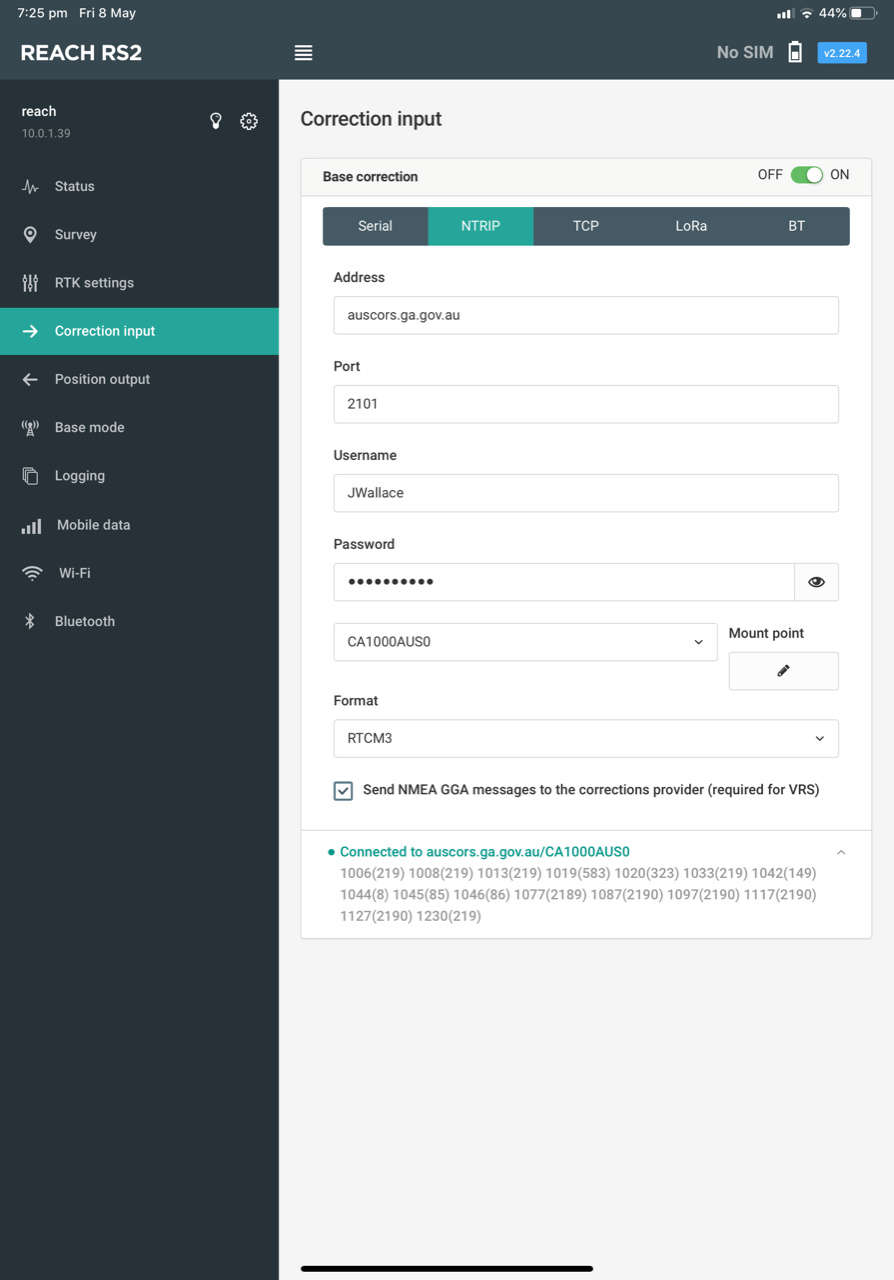
May I also ask you to share the screenshot of the correction input tab with an opened list of incoming RTCM3 messages? To enable it, you need to click on the “∨” button on the bottom.
Hi Tatiana,
Any feedback as yet?
Today, same location, I had the same issue. Later this afternoon it would float almost immediately and then get occasional short-lived fixes.
I expected to be able to have no issue at all fixing in this area with the no. of available satellites and a CORS 6km away.
I was hoping to use the RS2 on a jobsite on Monday, but with the lack of fixes I won’t be able to.
Let me know if there is anything else I can provide.
Kind regards,
James
As I can see, Reach RS2 is getting a lot of information from the caster: MSM7 messages for GPS, GLONASS, Galileo, and BeiDou. In the current dev v2.23 firmware version, we improved the stability of Reach performance while it’s getting a large number of messages from NTRIP caster.
Dev versions are mostly intended for testing purposes and we usually recommend being careful with using them for real field projects, however, I believe the v2.23 should help to eliminate the difficulties you encounter.
May I ask you to update your device and check if it works better? To do that, you may subscribe to dev branch in ReachView Settings.
Thank you for getting back to me
I upgraded to the dev kit this morning and it is now working; which is fantastic.
When is the next stable release due out?
Hi Tatiana, I am strange the comment of version 2.22.4, I use gps, galileo, glonass and beidou and always fixed solutions in NTRIP.
I use a Base and Rover RS2
Yep, I was just using one RS2. NTRIP connection to the AUSCORS service.
They are in the process of adding additional bases to the service and I will have 4 within 12km of me. 2 are up and running. Amazing free service.