



I’m setting up one of our bases as a static position on the side of our building to use via NTRIP out to a rover in the field. For the base should I set it as static or kinematic? When I prepare to go out to the field should I do an additional 30 minute observation time each time I go out or do it once I know what the known point is and put that in manually and then not worry about it again?
When setting up my bass for RTK corrections, how long is an adequate amount of time to leave the base collecting before I start using the rover for ground control points? 15 minutes, 30 minutes, 60 minutes, more?
It seems to me that if the base is installed on a fixed mount on the roof of a building, you could find its precise position either by making a long observation and post-processing it, or getting a precise position by RTK or RTN. From there you don’t need to average its position everytime, you just enter its coordinates manually and it’s good permanently (not taking into account small variations due to tectonics and the rest).
Hi Seth,
For the base should I set it as static or kinematic?
On Reach acting as Base, it’s better to use Static mode. This should help to resolve ambiguities faster as well as produce measurements with higher precision.
When I prepare to go out to the field should I do an additional 30 minute observation time each time I go out or do it once I know what the known point is and put that in manually and then not worry about it again?
In case you need to return to your working area next days, it’s better to determine a point for a base position and enter coordinates manually.
If you have a known geodetic point in your area, you can place your base over it and enter coordinates manually. In this case, base position is centimeter-precise regarding the real coordinates on the Earth.
You can make own point by connecting Reach to NTRIP and averaging Fix position.
By averaging Base position in Single mode, you can get a few-meter accuracy. In this case, Reach Rover can determine its position with centimeter-level relative to Base, but the absolute position will be shifted by the same value as Base.
I’d recommend examining the following guide for more information on the ways of placing the base.
When setting up my bass for RTK corrections, how long is an adequate amount of time to leave the base collecting before I start using the rover for ground control points? 15 minutes, 30 minutes, 60 minutes, more?
I’d say that 5 minutes is enough for averaging in Single mode. For Average Fix, I’d recommend 1-2 minutes. Please note, you won’t get absolute accuracy while averaging in Single mode.
On Reach acting as Base, it’s better to use Static mode. This should help to resolve ambiguities faster as well as produce measurements with higher precision.
Sorry for misleading, I meant Static mode on the Rover. For the Base, it doesn’t matter what mode is chosen.
2 Likes
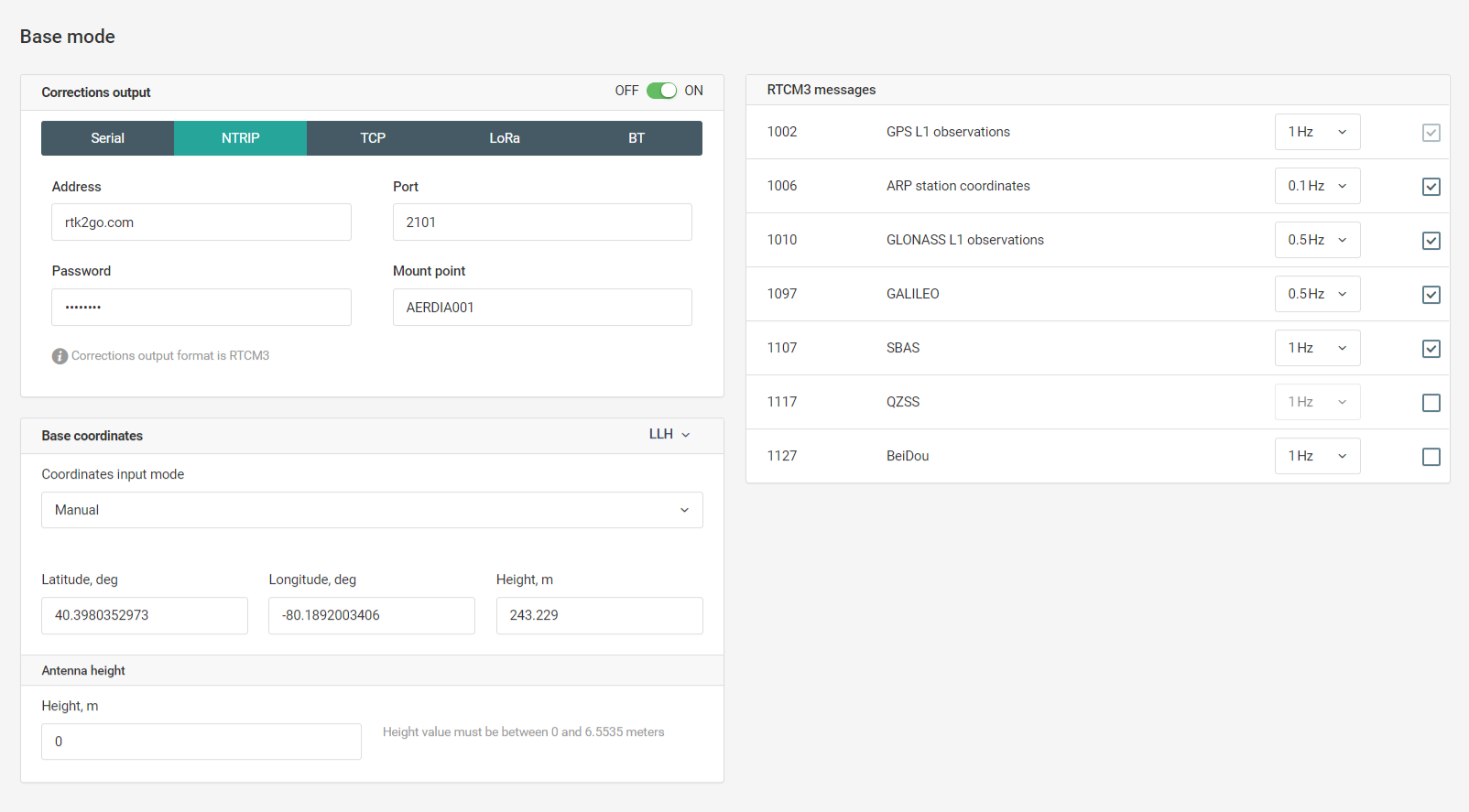
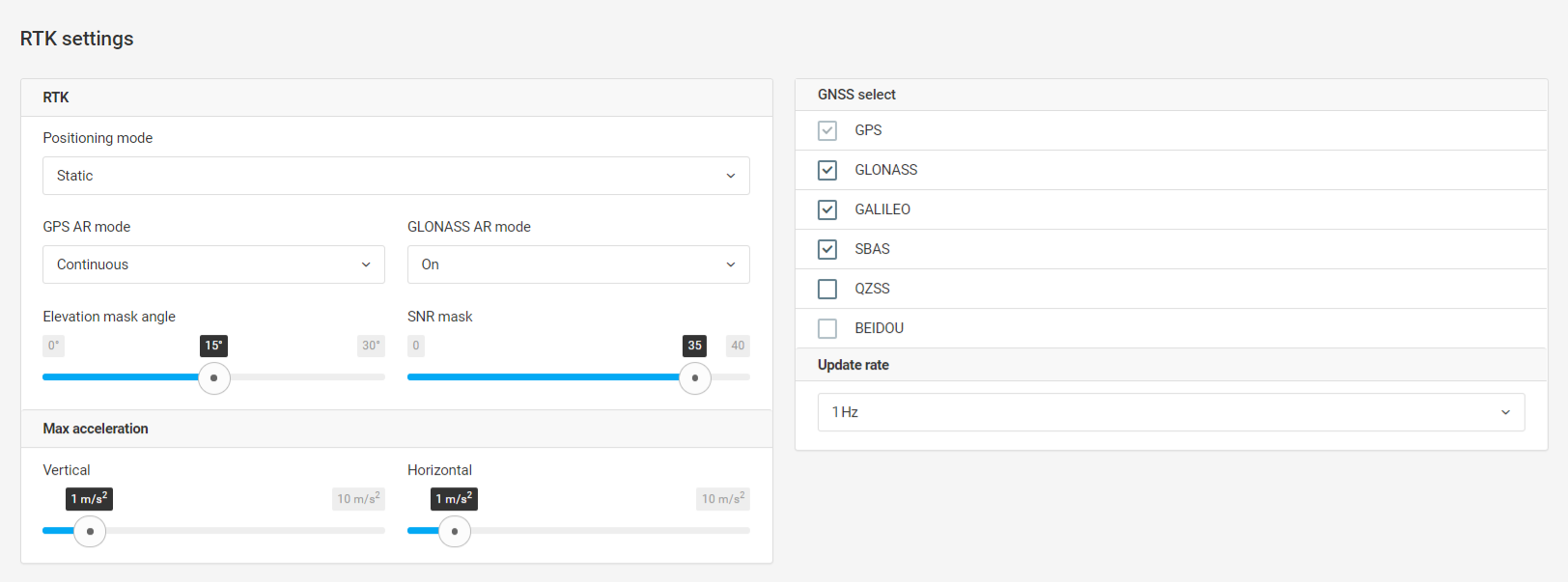
So here is what I have my base set to. Is this going to give me the most accurate base position to then use as the manual coordinate for the static base that I have hard mounted to the side of our building?
When i switch the base from average single to average float or average fix, it never collects the needed data to get a point. Am I doing something wrong? Is the base not meant to select average float or fix and can only use average single to determine its location?
Hi Seth,
I’d recommend checking the article about different ways of placing the base:
It will clarify a lot.
For averaging float or fix you first need to get corrections from the reference station.
1 Like
Ok, Ive got it connected but it wont gain the grey bars. Maybe you can look at this other issue and help there?
Great!
I’ve replied in another thread of yours. There’s no need in cross-posting as we see all threads in the list of new topics.