



reach is jumping from fix to float with this?
standart settings
gps only?
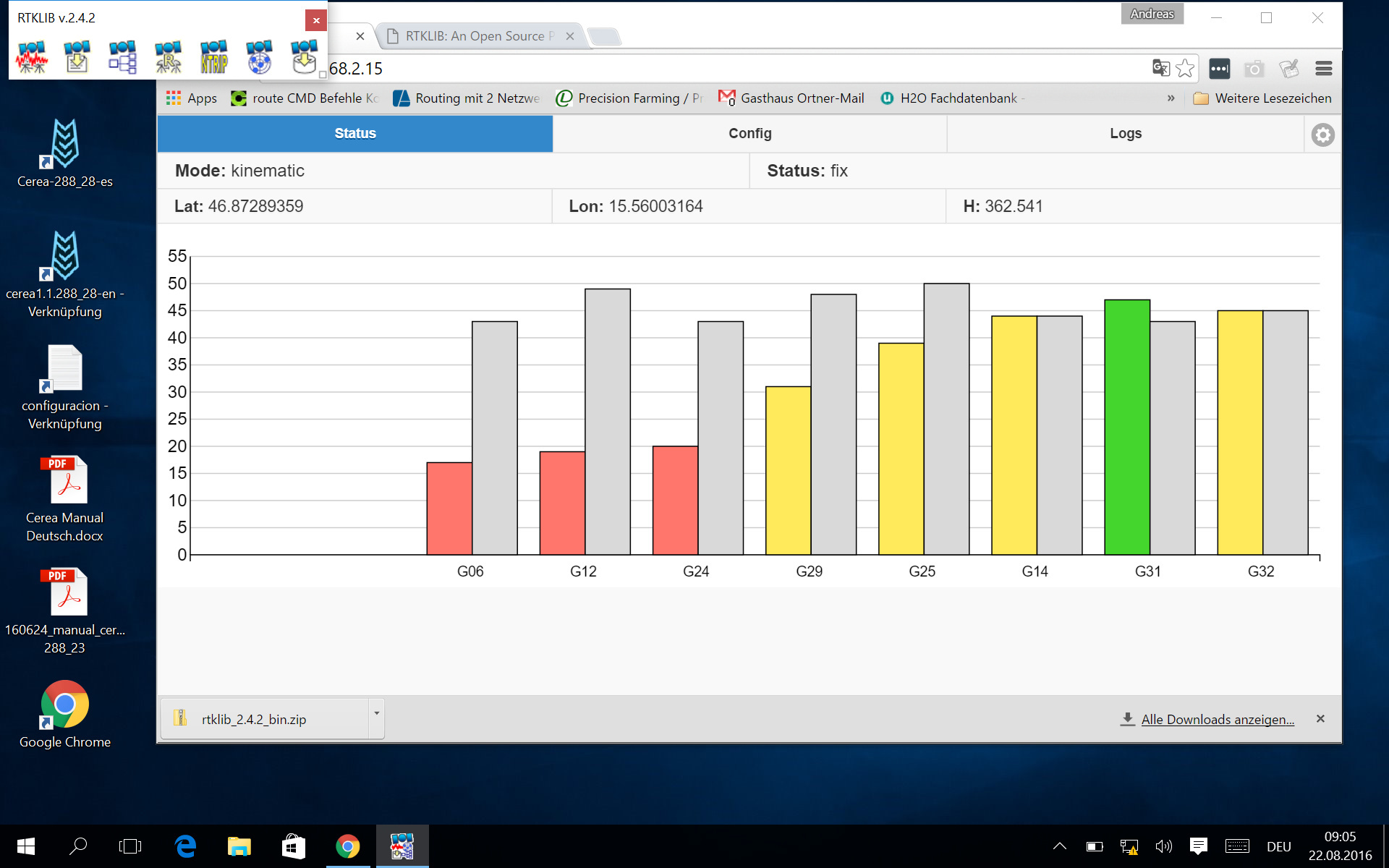
Andreas, could you please tell more about what is going wrong? The signal to noise ratio is below optimal so fixed solution is not constant.
why rtklib shows fix when the coordinates are jumping in meters?
whit so less ratio i nerver get a fix solution before??
You can stricten the criteria by setting snr mask, elevation mask. Please do not lower AR ratio and leave it on default (3).
Fix solution means that there is an integer solution where squared residuals are 3 (min ar ratio) times less when compared to the second best solution. That means that in poor conditions fix still can occur, if certain integer solution can be considered a significantly better one. Garbage in - garbage out principle applies very well here.
thanks!
can you give me a suggestion for values setting snr mask, elevation mask for better performance?
to you suggest fix and hold or continous?
That depends on the surroundings, we set snr mask at 35 by default, which helps skip poor satellite signal. Elevation mask should be adjusted according to your location, moderate setting is 15 degrees.
Fix and hold means that once integer ambiguity is resolved it will be held, in continuous it is resolved epoch by epoch. F&H will give you a higher fix rate, but it recovers slow from a wrong fix, with continuous wrong fix will be dropped fast.
@Andreas_Ortner Could you please upload raw log files from a ride? Both base and rover logged at 5Hz GPS+GLonass? That will help us analyze what is going on by post-processing.
here are my 2 files gps glo 5hz…
i have waited till fix solution then i started my ride…