Maybe a silly question but I am looking for some clarification about the message at the bottom of the page:
“Auxiliary function switches on channels 5-8 are still not supported and
could lead to erroneous PWM generation on motors’ channels.
We do ask to NOT SET AUXILIARY FUNCTION SWITCHES TO RC5…8.”
What does it actually mean for me? I am using switches on my TX which work on Channel 7 (for selecting flight mode selection) and 8 for triggering Auto tune. Is this going to cause an issue for me?
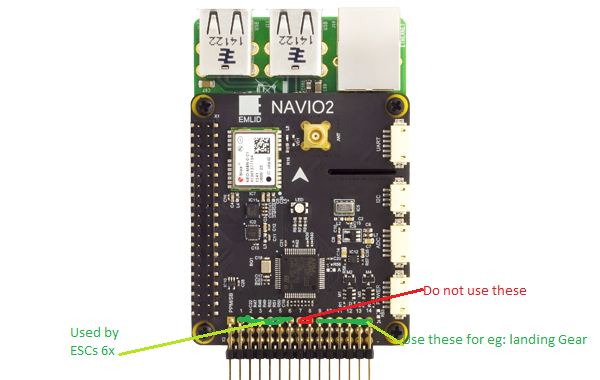
Do not confuse input channels from your TX and servo PWM outputs on the Navio.
You can do whatever you want with inputs.
Just do not configure APM to output anything on Navio outputs 5-8 (passthrough, gimbal, etc), if they are not already used by the vehicle mixer (octocopter for example).
Doing so messes up the PWM signal for the ESCs connected to the Navio and the motors might start to twitch/turn without arming the vehicle. This is really dangerous, if you already mounted the props on your copter.
Thank you very much for this clarification. I was also confused but now I understand how it goes. The only question i have now is… where do you set that, for example, the input channel 5 controls the output channel 9? (This is only and example, but I hope you understand what I mean).
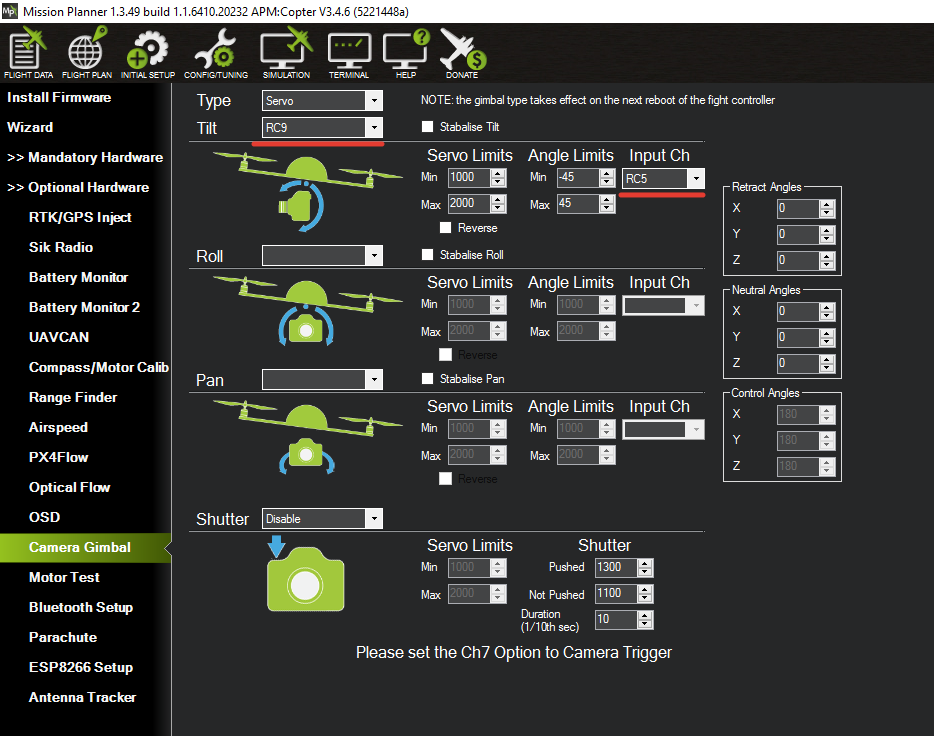
My intention is to use Tilt only, can I set up like above as a servo, then connect my brushless motor controlling tilt directly to NAVIO2 on output 9 thus bypassing the need for a gimbal control board ?
Thanks @mlebret, You’ve been a great asset to me in this adventure. I understand now
I’m still a little confused on Camera trigger. Mission Planner advises to set up channel 7 as camera trigger, I have my RC unit set to trigger camera RC channel 10. I have a small SONY IR Shutter control that I would normally Plug into the servo rail slot number 7, but if I’m understanding the Navio Docs, we’re not to use servo rail positions 5-8,
How do I get all the Camera setting offered in Mission Planner on Channel 7 to apply to Servo rail position we can use ie. 9-14