Hello everybody
I’m building a coaxial frame drone with Navio2 and Raspberry Pi2 and I have a problem with the RC channel n.2: the PWM output seems to be “wrong”, it that it causes the servo to make a lot of noise and vibrations. On one servo, I also see the “magic smoke”!
Searching the forum, I didn’t see any known issue about that… so my question actually is: which kind of servo do you suggest to use with Navio2? analog or digital? there is a servo model that is tested and certified for use with navio2?
Hi ivereninov
Actually I am not able to find the RC_SPEED parameter…
My plan is to connect an oscilloscope and check whether the PWM signal is correct or not. What sounds strange to me is that RC1 works perfectly…
Hi
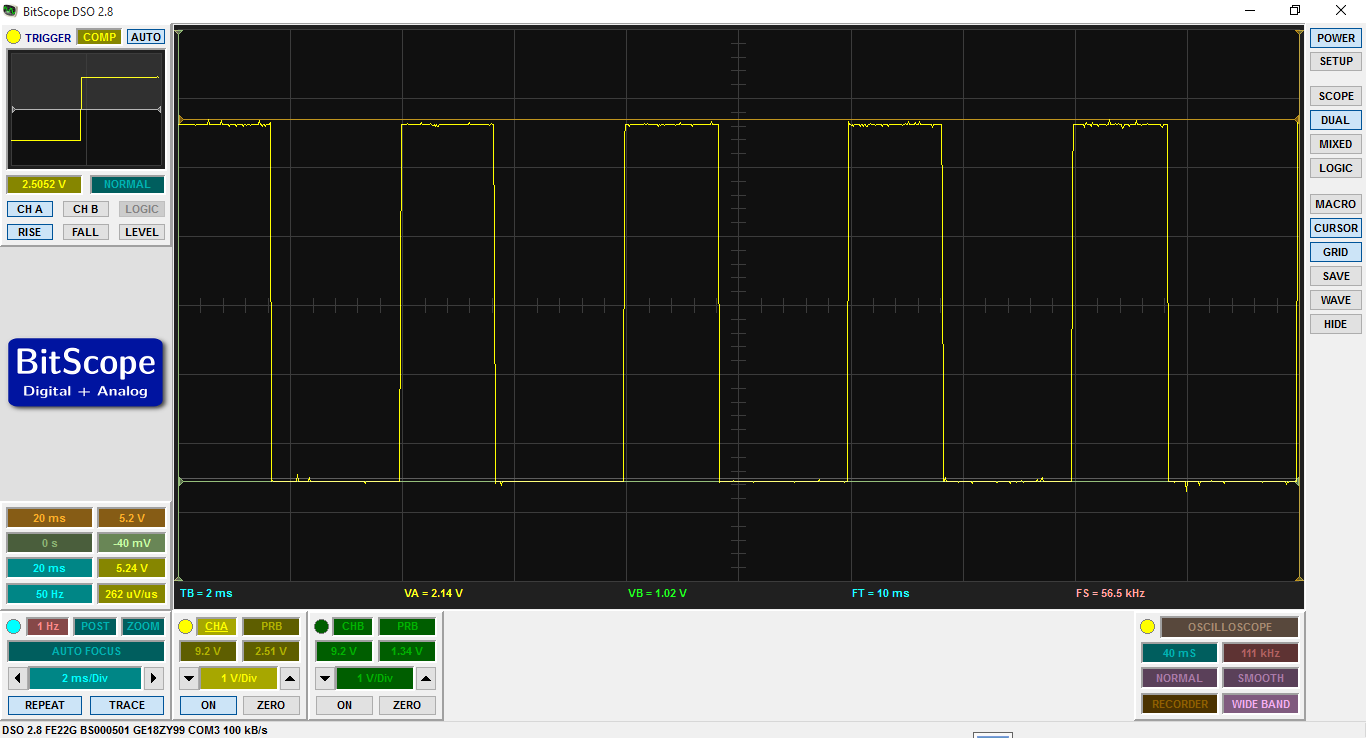
I connected an oscilloscope to RC1 and RC2 output and I see something strange: frequency is 4 ms (see attached screenshot, time is 2 ms/ div). Is this correct? shouldn’t it be 20 ms?
I finally found the parameter that controls PWM frequency
The parameter name is MOT_SV_SPEED.
The original value was 250 hz. I changed to 50 (hz) and now I see the correct WPM output