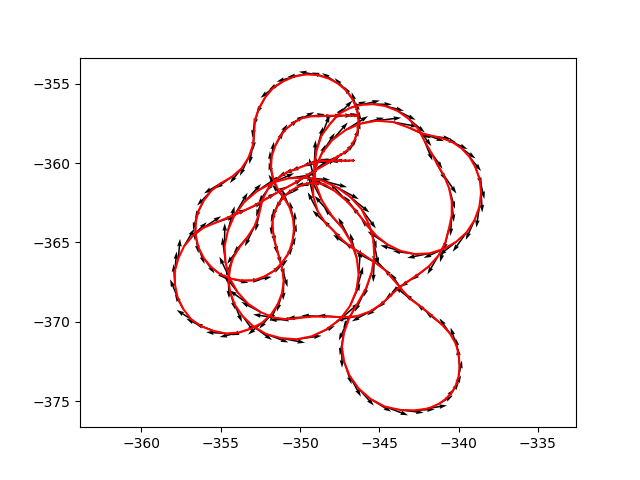
I am trying to use emlid reach to localize my robot. On 20th of Feb I went to an open area with clear blue skies and got a fix right away. This is a example of plot that obtained from the data.
Firmware image and ReachView version.
V2.10.0 (on both, reach RS and reach)
Detailed problem description. How does observed behavior differ from the expected one?
Couldn’t get fix(and the float was also jumping around) on the same site the next day(21st feb). I was using the same setup and the exact same settings the previous day(20th feb) and got great results.
More than half the satellites were green, so I didn’t know what else to look for.
Your step by step actions.
Switch on the base(reach RS), wait for the green led to light up, turn on the rover. Confirm that the radios are connected(the green light is stable when 2 paired radios are connected). Connect to the base using the reachview app. Make sure I have got a fix, then I proceed with my data collection.
Picture of the setup and connection scheme.
The reach rs acts as the base station which is mounted on a tripod and the rover unit is an self packaged version of normal reach module. They talk to each other using 915Mhz radio.
6) Attach RINEX log files for rover and base. If you prefer to keep them confidential, you can email the files to support@emlid.com with a link to the thread. Please note, that in this case other community members will not be able to help you.
The log files have been uploaded here: https://drive.google.com/open?id=1hD942a3Pb4BrB8ZAS2G4ExoNfmSnQO-e
I would think a combination of having good satelite geometry the day before (lucky), and not so great second time.
There is also alot of noice on your rover, but not on your base, which leads me to think you have interferenc messing up a great amount of the signals. Do you have a close up of you rover setup?
Antenna close to the ground is not optimal, but i understand when using it with this setup. But rising it few cm could help alot, so trying different hights might give you a better solution.
I have a 10cm copper base plate. Would increasing the size help with the noise. I have a wifi router on the car and voltage regulator units that might be injecting noise into the system.
Hey Subharanshu, am working on the exact same scenario and located in VA (an hour southwest of Baltimore)
drop me a note if interested in chatting over coffee at some point
Really hard to judge. If you actually had the same settings both times, I can only think of two things:
Some kind of problems with the radio link you use. You should try to monitor the age of differential on the rover. If it goes significantly higher than the frequency of your corrections(like more than 2 seconds for 1 Hz corrections), try increasing the baud rate.
I put a bigger base plate. I was using 10x10cm base plate before, now it’s 20x20. Looks a bit ridiculous but wanted to eliminate that problem. For sure, the satellite signal quality has gone up.
Here is a single line from the rover’s solution file(.erb)
(date)2018/03/13
(time)21:18:10.000
(lat)39.321877714
(lon)-76.626354456
(altitude)11.7717
(quality flag) 2
(num of satellites)15
(sdn)0.0943
(sde)0.1132
(sdu)0.1530
(sdne)-0.0594
(sdeu)-0.0234
(sdun)-0.0318
(age of differential)0.40
(ratio factor, should be three for good fix)1.2