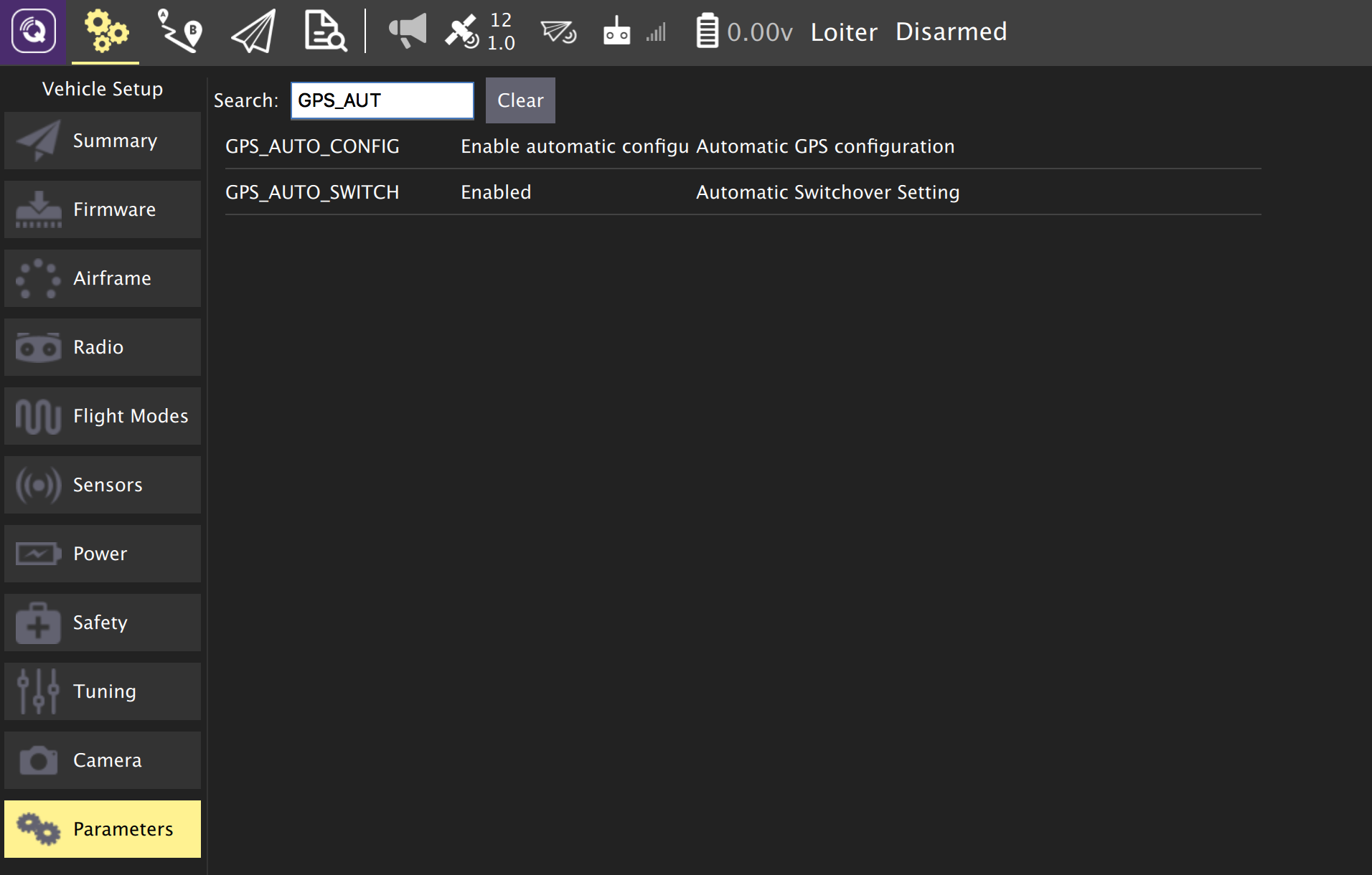
I am currently using a Reach RS as base and Reach connected to my Navio2 via UART. They are all running the latest stable versions of their respective softwares.
I work from a Mac so I can’t use MissionPlanner to inject RTK corrections in telemetry for now. I think I could use Mavproxy for that, but for the moment, I’m connecting the Reach directly to the Reach RS base.
I am having a little issue with my setup however in QGroundControl as I followed the Ardupilot Integration tutorial.
QGroundControl keeps giving me errors “GPS 2: Not found” and will not allow me to arm my copter.
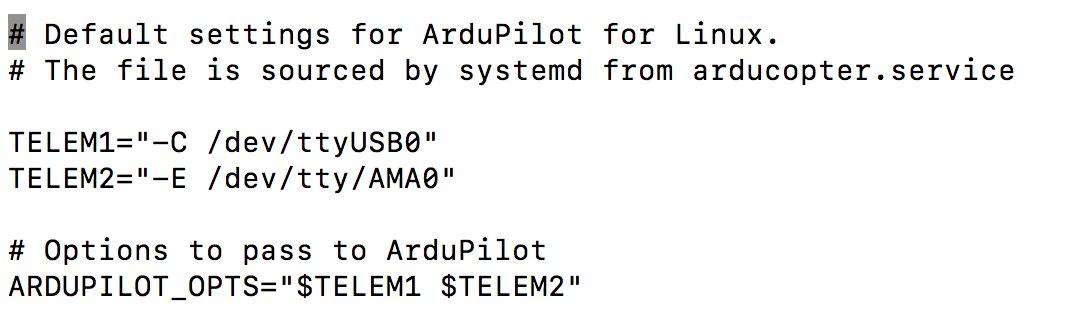
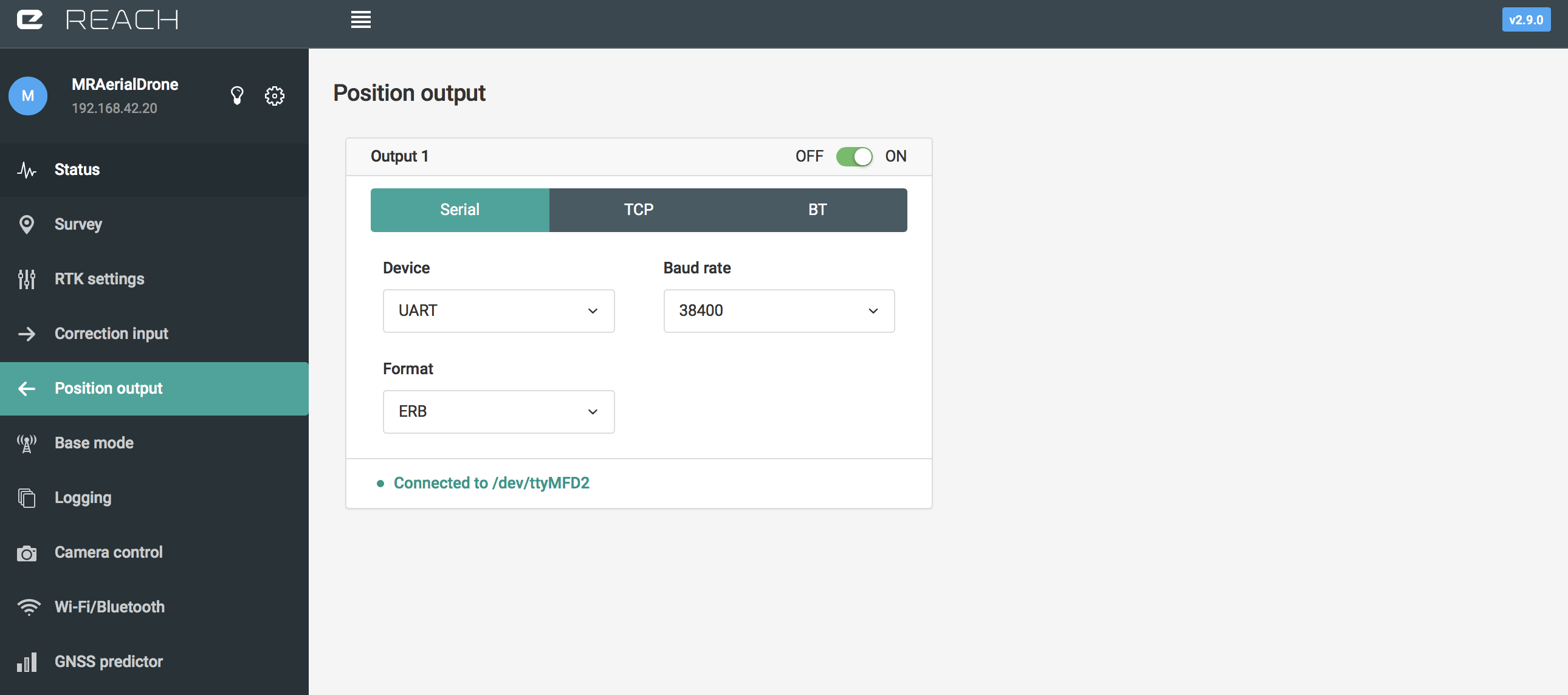
Here are the screenshots you asked and the APM configuration.
When I connect the Reach RS (base) to the Reach on the rover, I can see obs()'s counting so I imagine that connection is working properly and the corrections are being exchanged.
Apart from connecting the Reach directly to the base, I configured everything in QGC (and checked many times over ) exactly as shown in the tutorial.
When I try to arm the system in any GPS-required mode I get the error that GPS 2: was not found.
I’m going a bit crazy now and don’t know where to go from here.
QGroundControl does not recognize USB-to-PC connection to Reach RS, does it? I tried to use MAVProxy to inject the RTCM corrections into the telemetry link but it’s not working either.