I used the provided Hardware Assembly, as it is available on Emlid setup page. the BEC Wire of the servo1 remains connected and the BEC wires of the other Servos have been cut as it was described in the official guidance to Hardware assembly of Navio2.
I’ve used Mission Planner 1.3.74 ArduCopter V4.0.3 to calibrate Accel, Compass and ESCs. The Calibration has been successfully done and the embedded LED on Navio2 board is blinking blue. Setting Throttle down to its Minimum position and pushing the stick to the right side (YAW) forces a solid blue LED, indicating arming the copter.
If the Throttle is being maximized to increase the rotation speed of the servo Motors, the copter is going to be tilted to a side and the copter does not flight stable vertically. I monitored the Servo Positions in ArduPilot and it looks as follows indicating on the Screenshot bellow:
The throttle has been set on an unchanged position but after couple of minutes the servo 1 remains stable but servos 2, 3 and 4 clime down, especially the Servo number 2, as if the supply current would be dropping continuously with time.
Do I understand right that the main issue is that your copter tends to tilt during the flight? Does it tilt to one particular side or change from one to another?
Thank you for your assist. It tilts just to the one side. By the Way the only one ESC, whose BEC Wire is also connected, gets warm. Although, regarding to the Documentation, it must not get warm, if only One BEC is connected and all other BECs have been disconnected.
If the copter tends to tilt one side, I suggest ensuring that the copter’s center of gravity is at the exact center. Please make sure that the battery is centered on your copter.
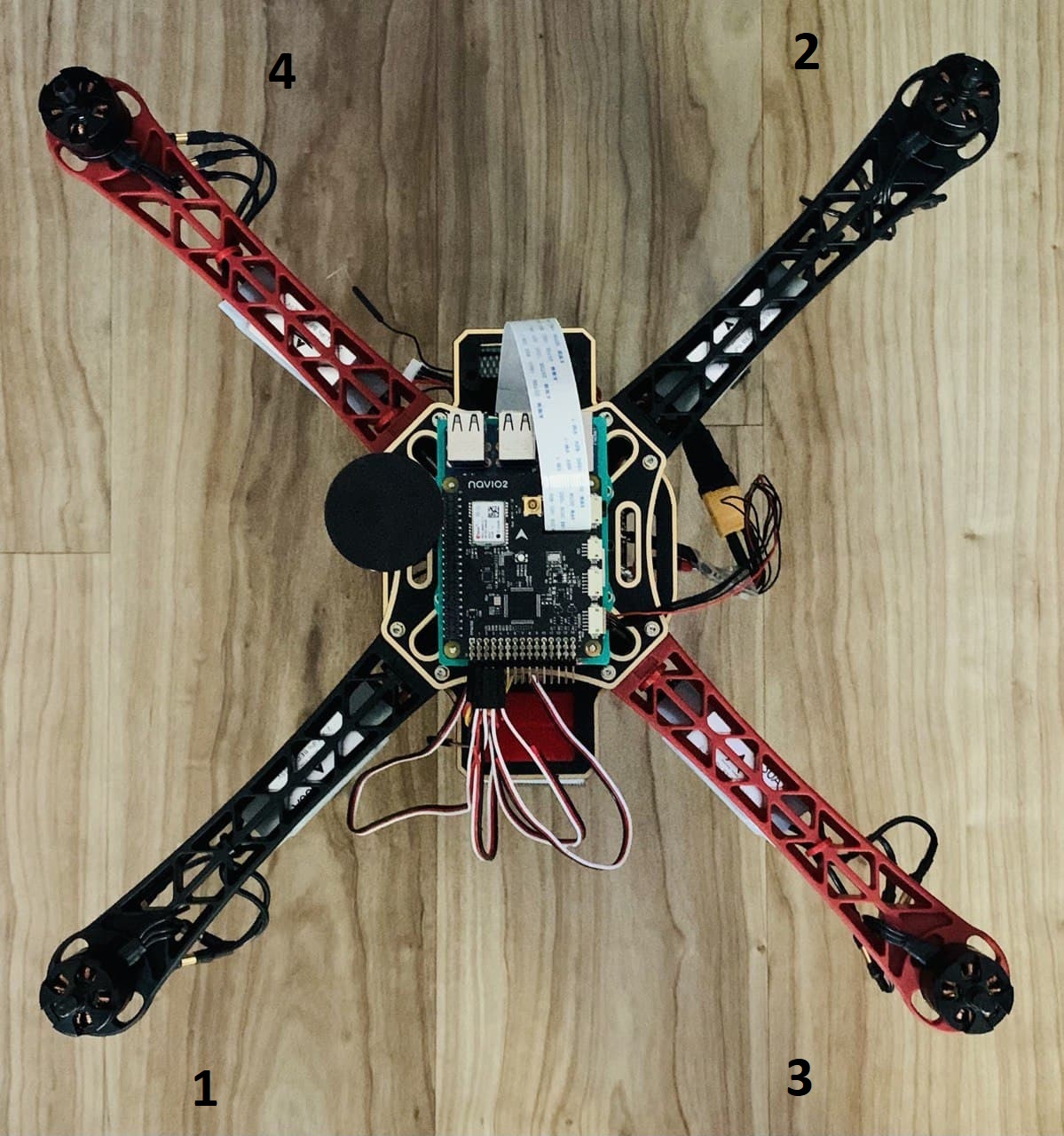
Also, you may double-check whether you’ve set up right your forward-rotating and counter-rotating props on the corresponding motors. Please take a look at this guide for more detail.
Indeed, only one ESC power wire should be connected to the Navio2 servo rail. So that it won’t cause overheating. However, have you checked that no other closely placed elements produce heat?
If the copter tends to tilt one side, I suggest ensuring that the copter’s center of gravity is at the exact center. Please make sure that the battery is centered on your copter.
Also, you may double-check whether you’ve set up right your forward-rotating and counter-rotating props on the corresponding motors. Please take a look at this guide for more detail.
As you see on the picture, there is no Propeller installed, therefor the center of the gravity does not play a roll, because the copter does not fly at all. The directions of the propellers regarding to the rotation have been set correctly.
Indeed, only one ESC power wire should be connected to the Navio2 servo rail. So that it won’t cause overheating. However, have you checked that no other closely placed elements produce heat?
I have set it up as it is described in the your guidance and there is nor heating source close to the ESCs.