When I run the code GPS I obtain the following results.
pi@navio-rpi ~/Navio/C++/Examples/GPS $ ./gps
Ublox test OK
GPS Millisecond Time of Week: 116090 s
Longitude: -0.611799
Latitude: 38.291628
Height above Ellipsoid: 143.860 m
Height above mean sea level: 95.611 m
Horizontal Accuracy Estateimate: 11.169 m
Vertical Accuracy Estateimate: 16.006 m
GPS Millisecond Time of Week: 116091 s
Longitude: -0.611796
Latitude: 38.291628
Height above Ellipsoid: 144.175 m
Height above mean sea level: 95.926 m
Horizontal Accuracy Estateimate: 11.149 m
Vertical Accuracy Estateimate: 15.767 m
GPS Millisecond Time of Week: 116093 s
Longitude: -0.611792
Latitude: 38.291622
Height above Ellipsoid: 143.150 m
Height above mean sea level: 94.902 m
Horizontal Accuracy Estateimate: 11.187 m
Vertical Accuracy Estateimate: 15.563 m
Current GPS status:
gpsFixOk: 1
gps Fix status: 3D-fix
GPS Millisecond Time of Week: 116097 s
Longitude: -0.611772
Latitude: 38.291590
Height above Ellipsoid: 139.780 m
Height above mean sea level: 91.531 m
Horizontal Accuracy Estateimate: 11.006 m
Vertical Accuracy Estateimate: 14.729 m
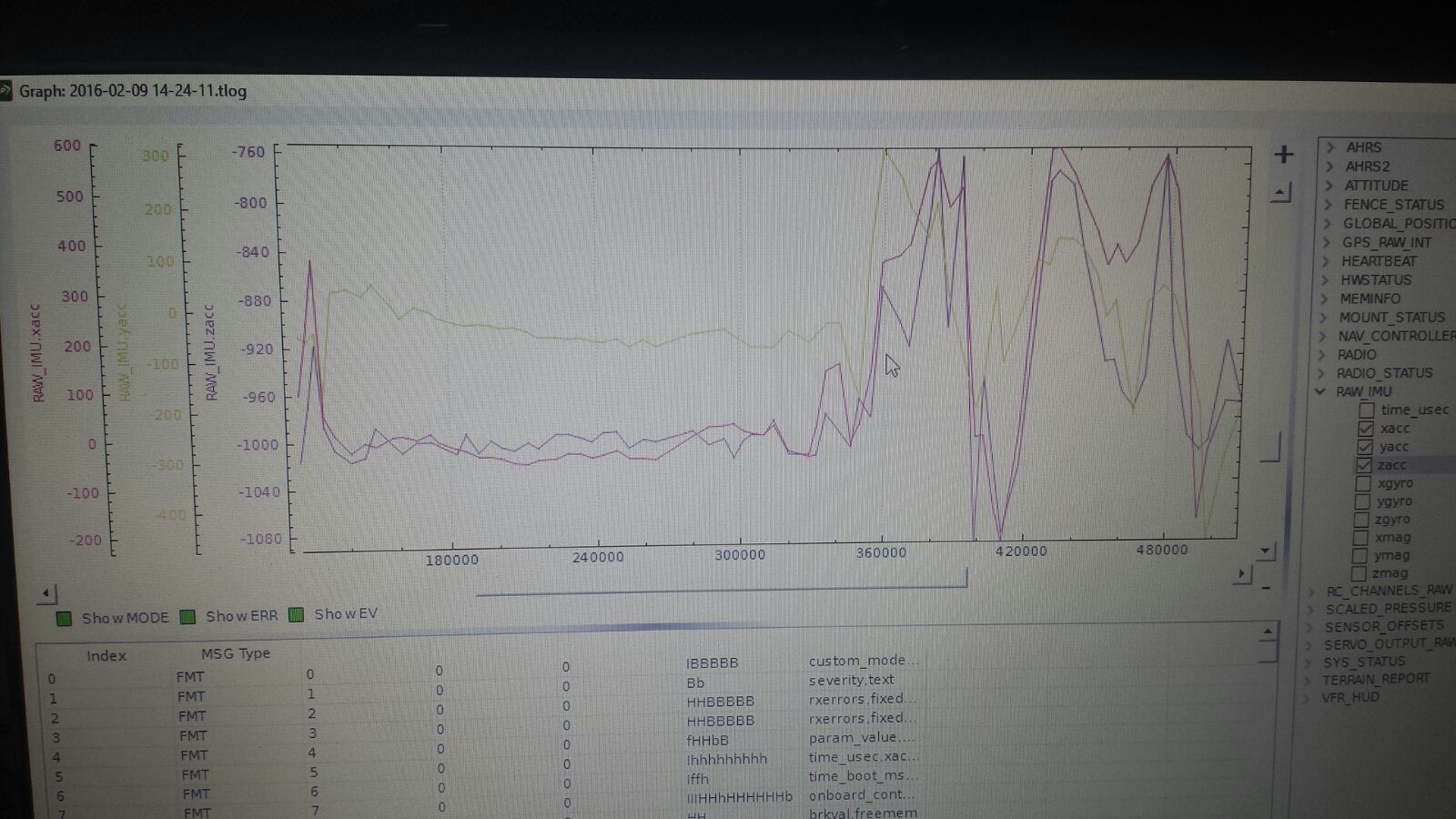
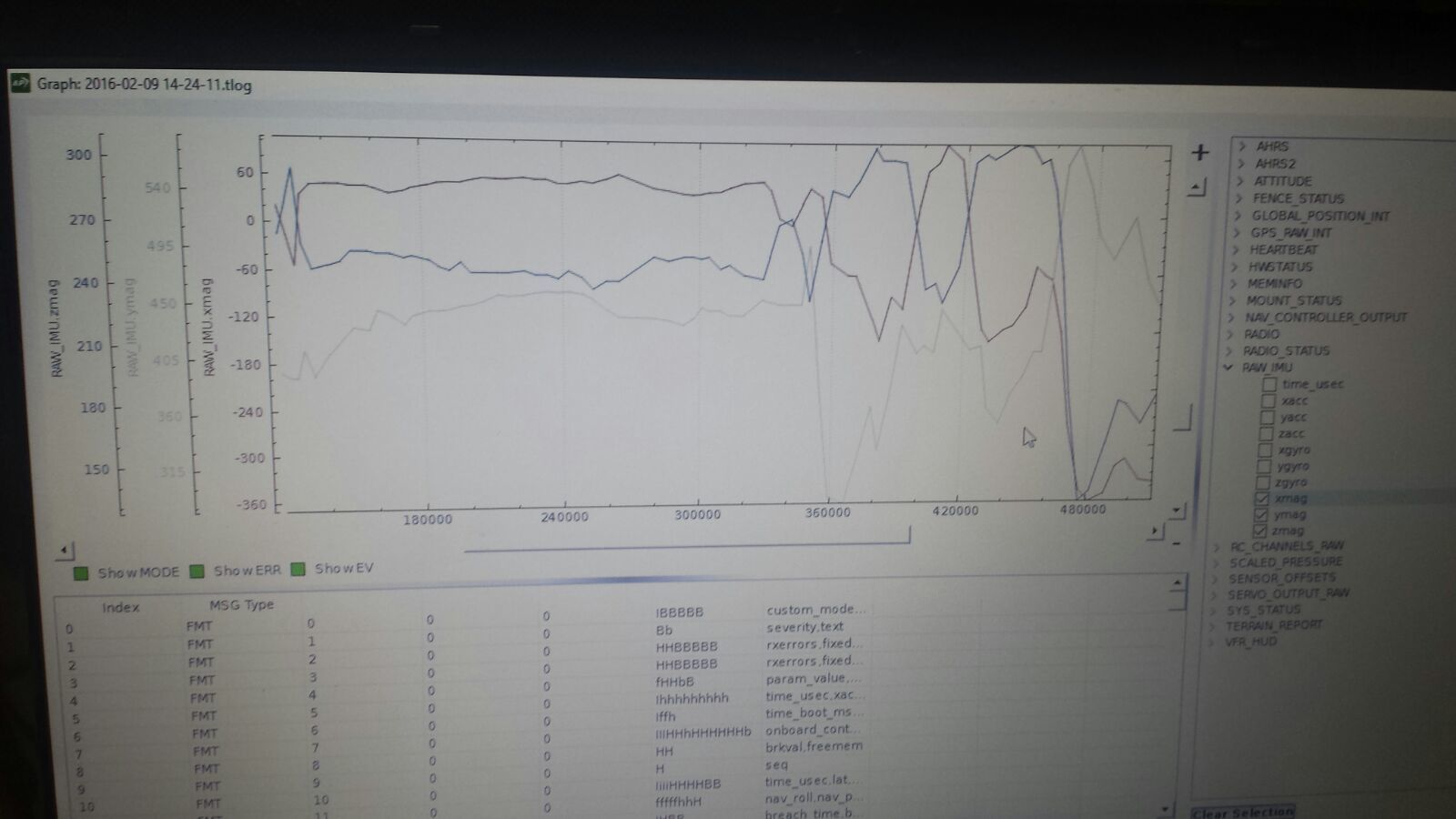
As we can see results values are not fixed and at no time I have moved the Drone.
In addition when I’m making an autonomous flight Drone doesn´t realize the route and I obtain Error compass variance.
Someone has obtained these results?
You know if the board goes wrong or I can do to solve my problems?
Thank you
The offsets values that you see during the calibration are different from what GCS expects from a Pixhawk\APM board. That happens because the internal compass of MPU9250 has a wider range than HMC5883. It shouldn’t be an issue. Here’s some info about it:
Did you disable the APM before running the Barometer example?
Do you have the barometer covered with an open-cell foam?
Where was you drone located when you were running the GPS example?
Hi,
When I fly the Drone with athold o Loiter mode with the internal compass,the drone did not pick up that fixed with the knob, plus several times I lost control and did not respond to the command.
I will add an external compass and that mistake was corrected. The problem is that I still even giving error compass variance when I’m flying the Drone,I do not know if this problem is because the mission planner even detect the internal compass or I have some other failure in the compass
When I run the barometer I have running the APM.
GPS’ve tried abroad and when I fly the Drone in auto mode sometimes does not work well and doesn’t make the route.
Tanks you.
Please do NOT run APM and examples simultaneously, especially in flight. This leads to resource access conflicts in the system and results in incorrect output values.
So I can not send sensor data while I’m doing the flight?
These are my GPS data without APM:
Ublox test OK
GPS Millisecond Time of Week: 123483 s
Longitude: -0.611590
Latitude: 38.291769
Height Above Ellipsoid: 151759 m
Height above mean sea level: 103 510 m
Horizontal Accuracy Estateimate: 4,700 m
Vertical Accuracy Estateimate: 6,135 m
Current GPS status:
gpsFixOk: 1
GPS Fix status: 3D-fix
GPS Millisecond Time of Week: 123484 s
Longitude: -0.611588
Latitude: 38.291769
Height Above Ellipsoid: 151622 m
Height above mean sea level: 103 373 m
Horizontal Accuracy Estateimate: 4,716 m
Vertical Accuracy Estateimate: 6.172 m
GPS Millisecond Time of Week: 123484 s
Longitude: -0.611588
Latitude: 38.291769
Height Above Ellipsoid: 151672 m
Height above mean sea level: 103 423 m
Horizontal Accuracy Estateimate: 4,735 m
Vertical Accuracy Estateimate: 6,218 m
Current GPS status:
gpsFixOk: 1
GPS Fix status: 3D-fix
GPS Millisecond Time of Week: 123484 s
Longitude: -0.611585
Latitude: 38.291769
Height Above Ellipsoid: 151736 m
Height above mean sea level: 103 487 m
Horizontal Accuracy Estateimate: 4,815 m
Vertical Accuracy Estateimate: 6,358 m
No, you should never run examples while in flight with APM running.
If you did run them during the flight then this is probably the reason of your flight issues.
You can obtain flight sensor data from the APM logs.
I run the examples with the APM, but I have not tried out the examples while on the flight.
I thought it could be done and once flew well Drone wanted to get the values of the sensors while flying, but you can not
You know that can be of erro compass variance?
There may be different reasons to this, try to move RPi/Navio+ further away from power distribution / ESC / Battery, replace parts that may contain iron with plastic / carbon / aluminum.
After that restart APM and calibrate your compass again (always restart APM before calibrating compass).
I have repeated several times the compass and I changing the raspberry and navio+ site and I keep getting error compass variance.
I can run commands to view a camera via streaming while I’m flying the Drone, or that too will fly me wrong Drone?
The external compass that I use is the HMC5883L
My drone consists of a Raspberry Pi 2 B, Navio+, power module,GPS antenna (Kit that comes with the navio +), Lipo battery 3000mAh, kit DJI F450, 3DR, receiving GR-16 and mz-12 transmitter