Hello guys,
I wanted to gather all sensor information during the flight. I created psql database in raspberry pi and wrote all the sensor information into my database. However, In order to do that, I used one serial port like below,
TELEM1=“-A udp:127.0.0.1:14561”
Now, I want to use the second serial port in order to control my drone using my python script (it will run on Raspberry Pi). For example,
TELEM2=“-X udp:127.0.0.1:14571”
In summary, I want to get data from my sensor while having the control capability of the drone through python scripts. How could this be possible?
The guide I followed here Navio2
Hi Joseph,
Welcome to our community forum!
You can use the rest of the switches for TCP/UDP connection. Here’s the list of switches that you can choose from. Don’t forget to specify all the TELEM<X> variables in ARDUPILOT_OPTS.
I actually solved my problem. Let me show you how this problem is solved step by step.
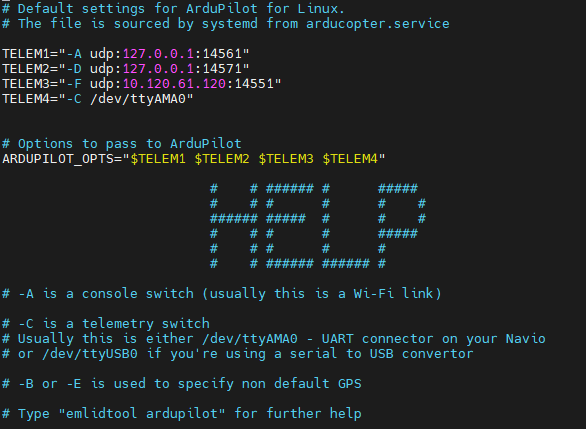
I’m using TELEM3 as flight software communication (mission planner).
TELEM4 is for telemetry module.
TELEM1 is for postgres database in the drone.
TELEM2 is for python script (command and control with python script).
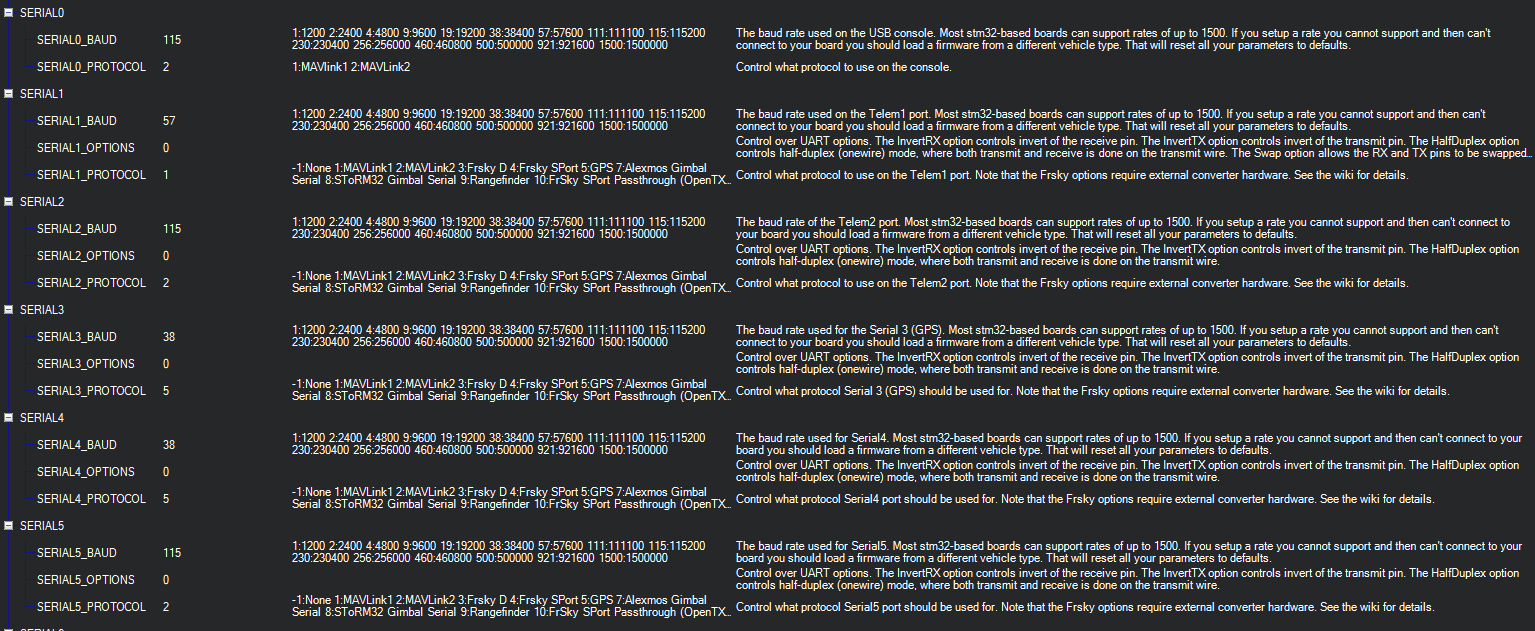
I also changed serial baudrate from mission planner
According to your documentation below,
And it worked. Thanks.
I’m using MAVLINK2 protocol in my design that’s why I’ve chosen the serial protocol as 2 in the mission planner configuration.
Hi Joseph,
Thanks for sharing the solution that worked for you!