Hi Steve,
Thanks for your patience! I’ve checked your data. You can find my comments below.
Please, update your receivers to the last stable v2.22.7. It contains a lot of important improvements that enhanced overall stability with solution obtaining.
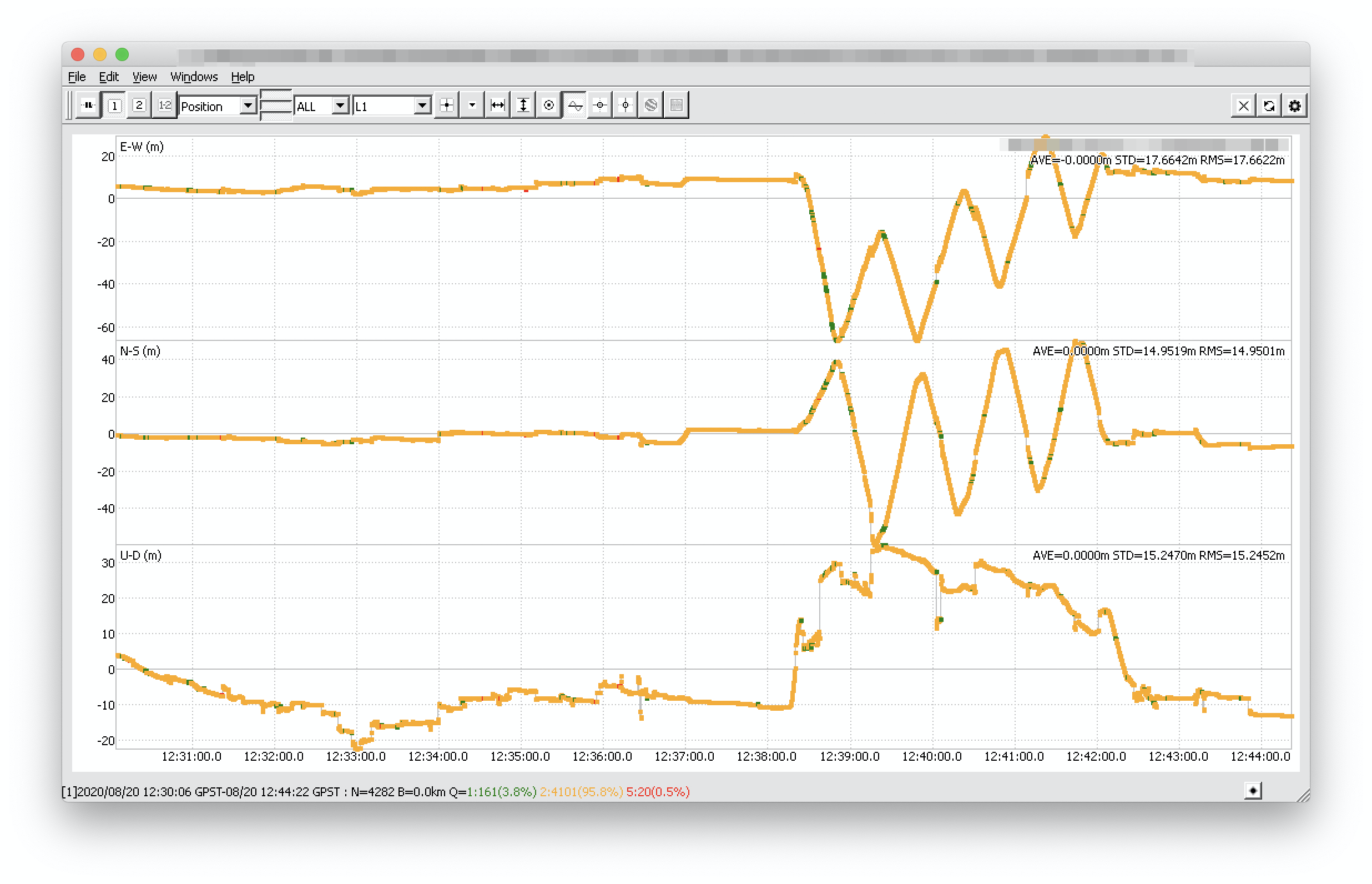
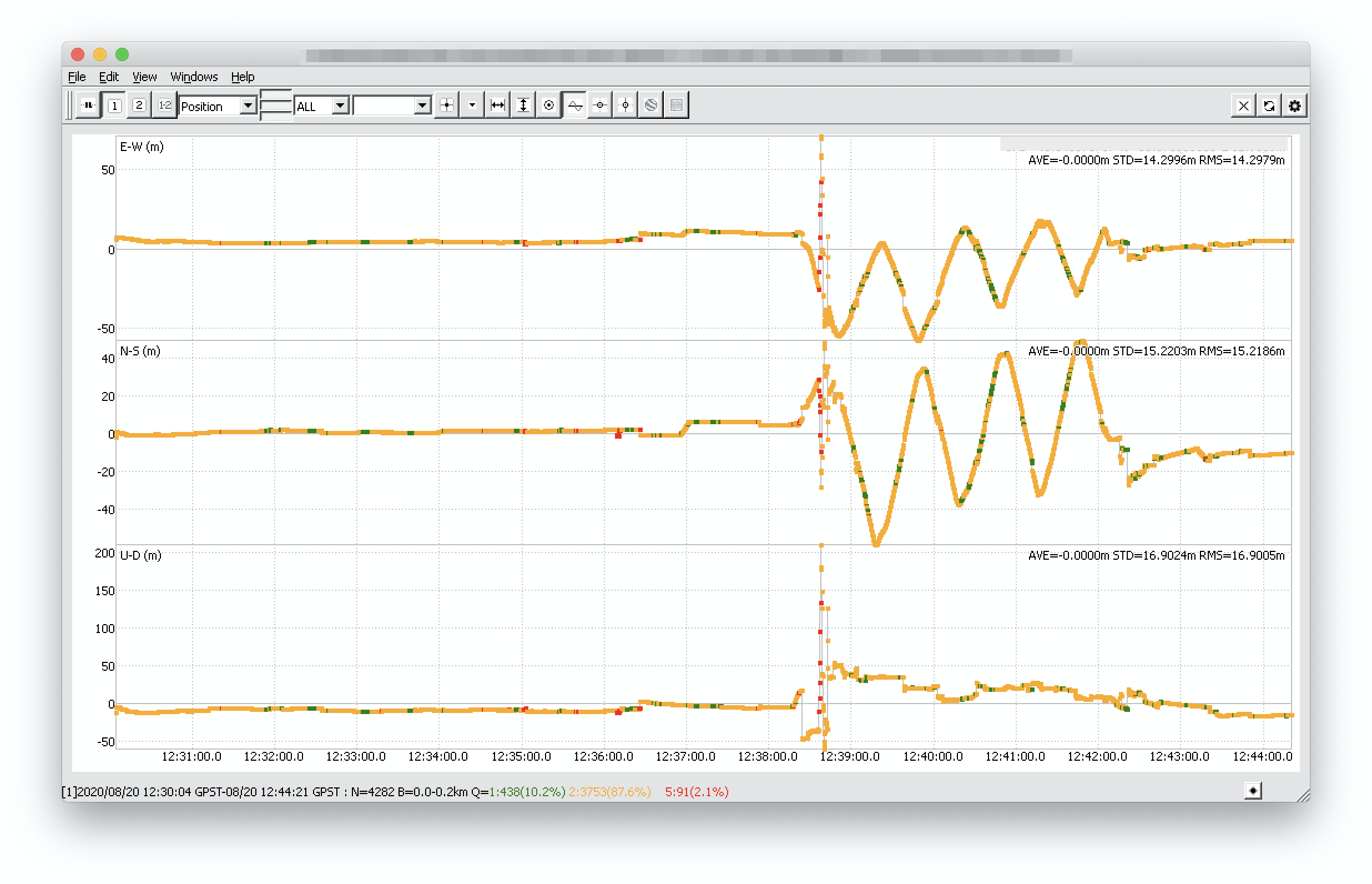
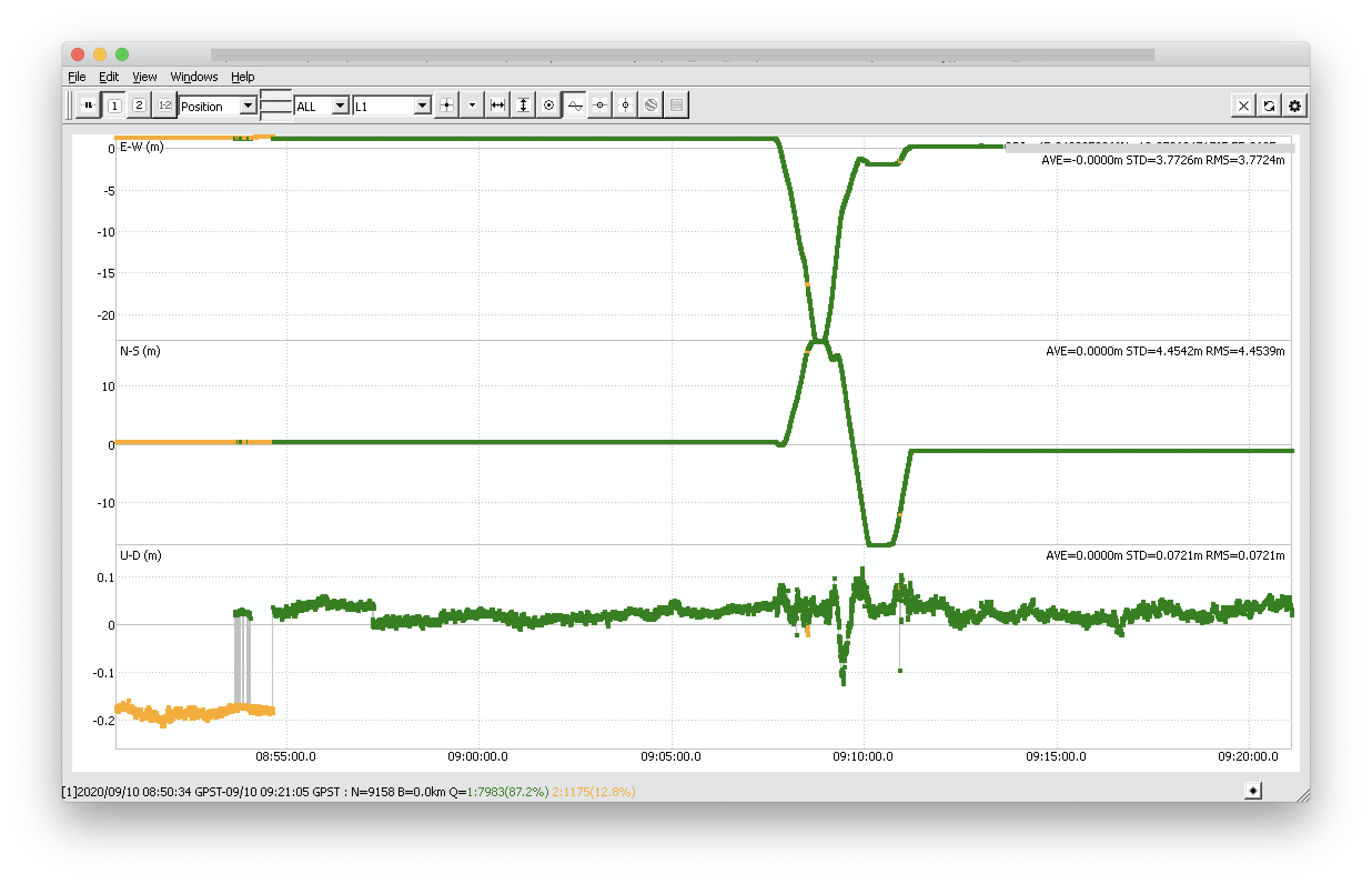
The altitude incorrect values since there is no solid Fix in the RTK and PPK solution. You can see on the screenshot below that there is 96% of Float in RTK and 88% of Folat in PPK.
Those issues are caused by the low quality of the observational data from the rover and the base.
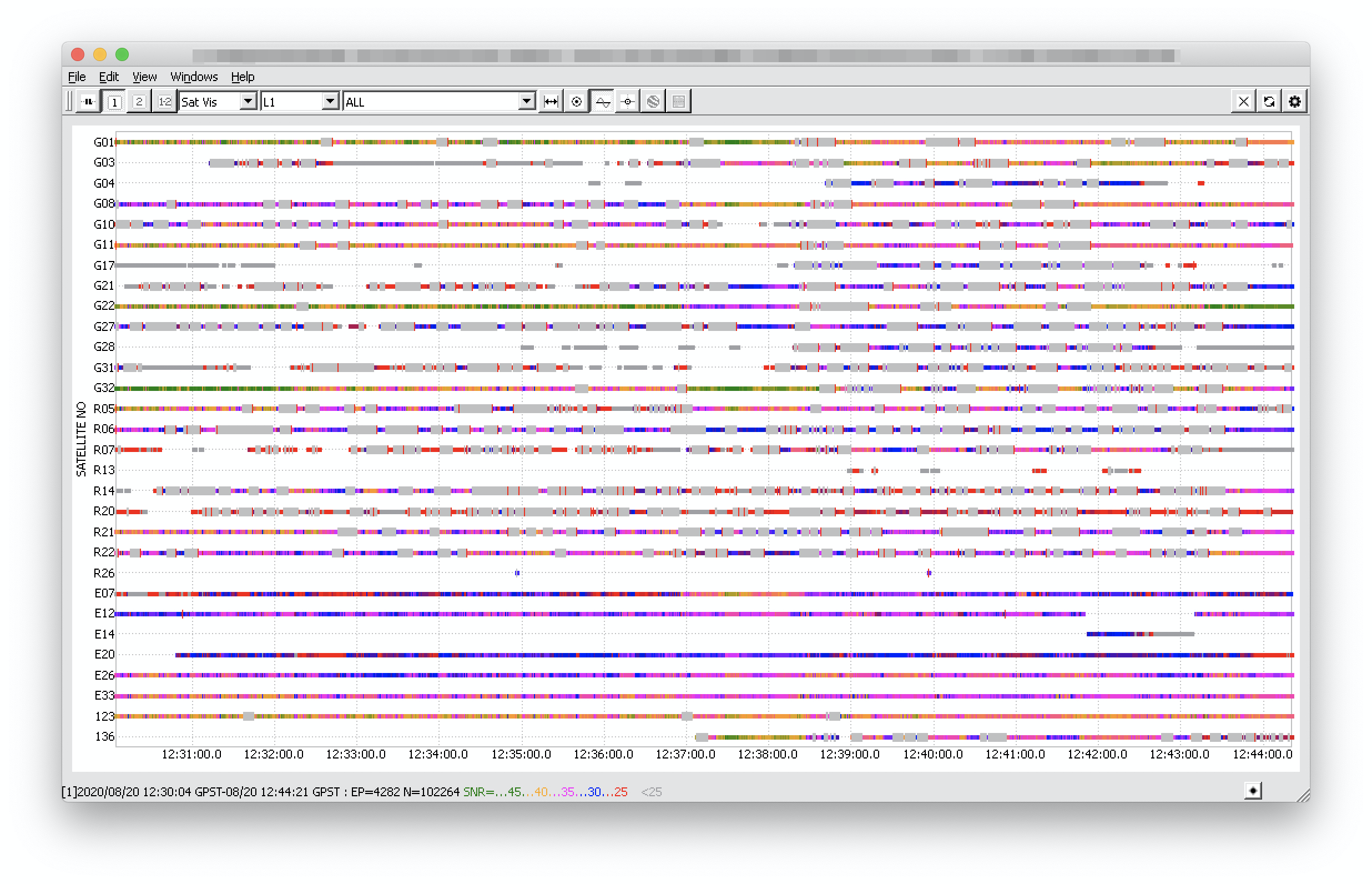
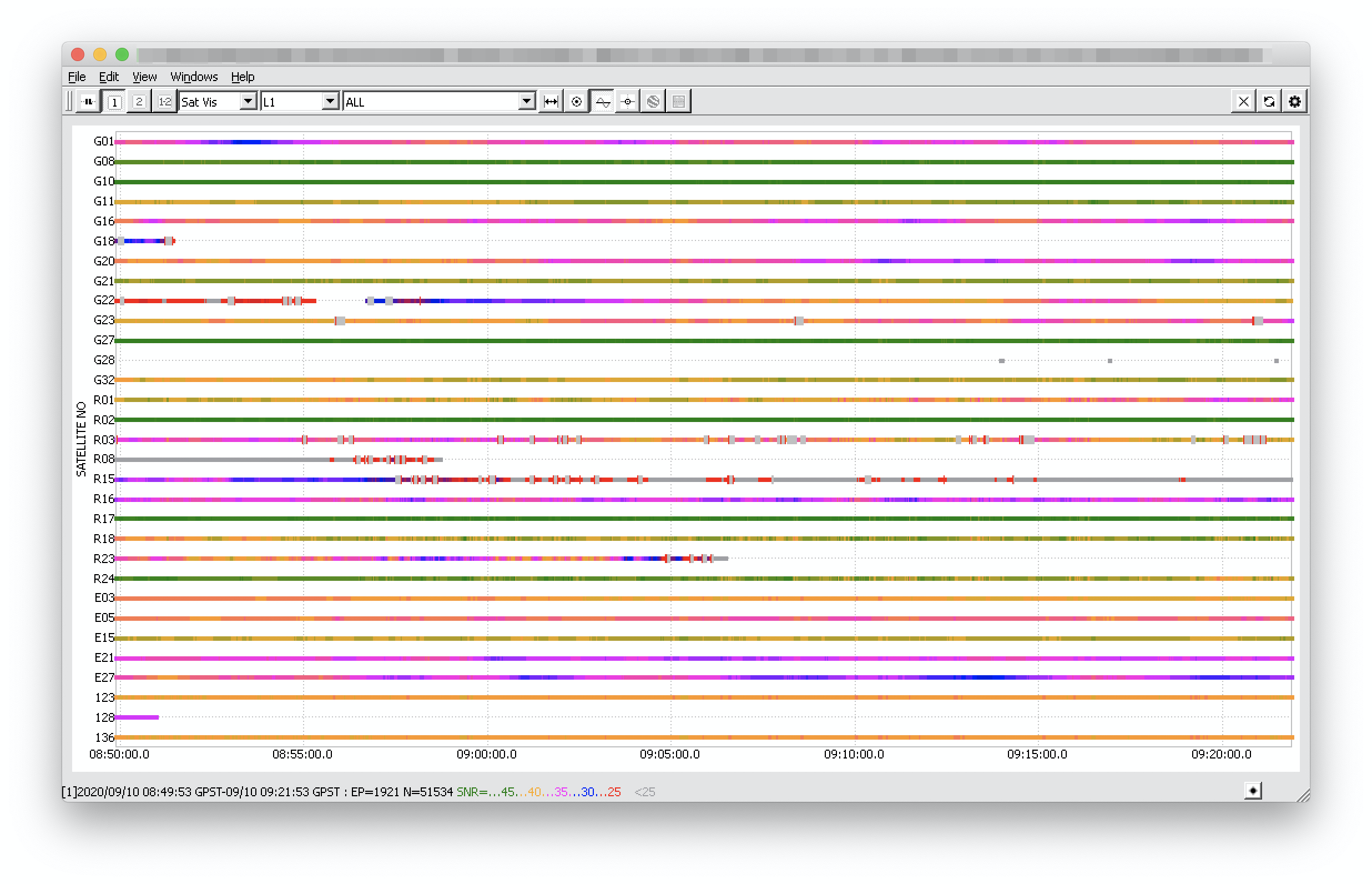
On the screenshot below, you can see the observational data from the rover. There is an immense amount of cycle slips and only a few signals have SNR above 40.
Such data quality can’t provide you with good RTK or PPK results. Usually, there are two main reasons why it happens:
- challenging environmental conditions
- the incorrect hardware setup
Let me address each below.
Environmental conditions
Reach M+ is a single-band receiver, so it’s essential to make sure that the receiver is provided with a clear sky view. Surveying with M+ in the dense forest or near electrical lines might cause significant issues with the observational data.
It’d be great if you could provide the photos of the environment you surveyed so that we could check it.
It’s also important to place the antenna correctly. Improper antenna setup can worsen the data quality even if the environmental conditions are good. You can check out our guide that explains how to place Reach’s antenna correctly for achieving better results.
Hardware setup
It’s important to keep the unit away from electronic components. If you’re integrating Reach in a complicated hardware setup with internal electronics, it can affect the unit’s performance. Please, share the photos of your setup so we could check it.
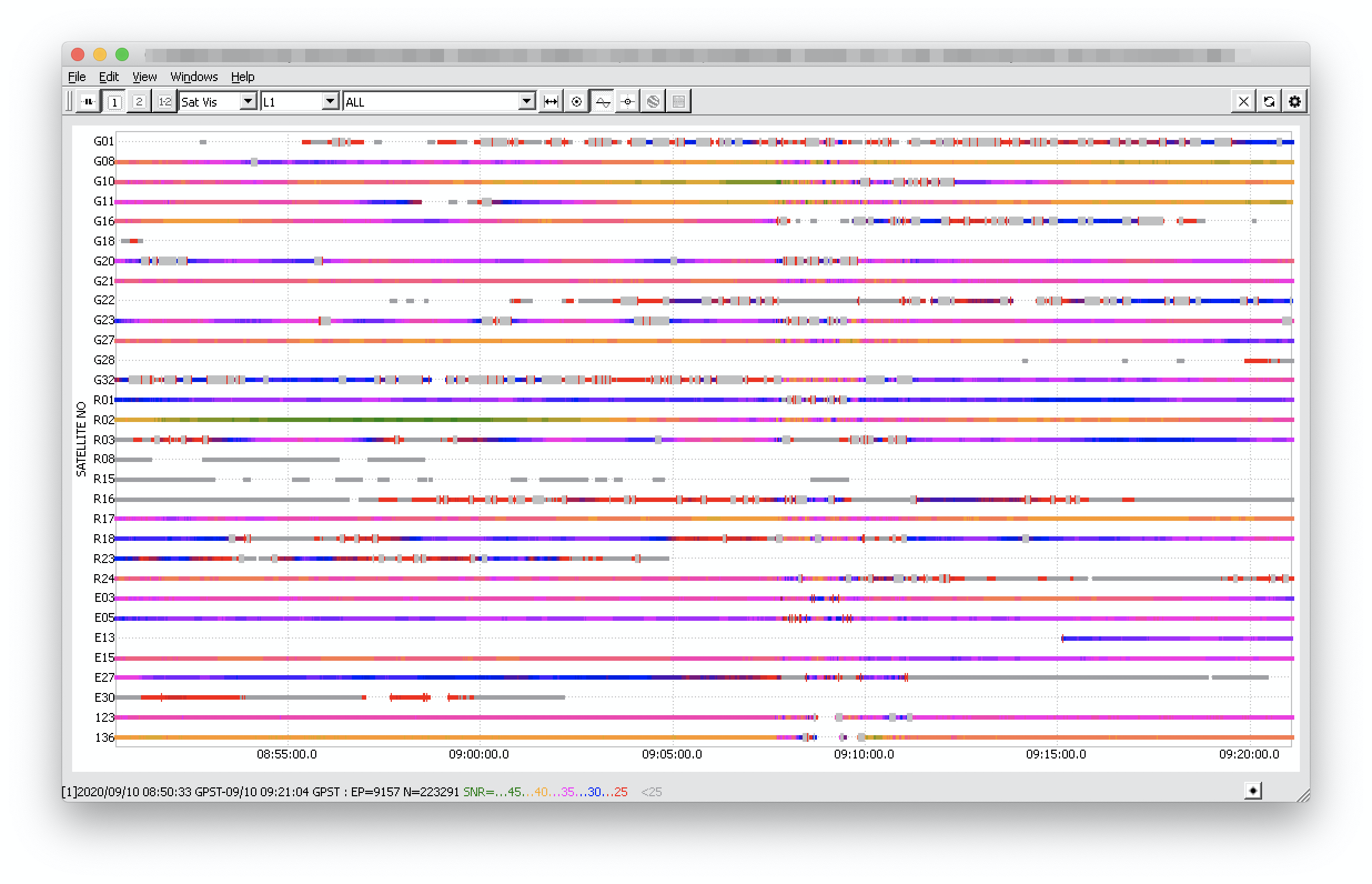
Also, in the base correction log, there are a lot of cycle slips there as well which might indicate issues with the receiver’s placement. Please check this guide on the Reach RS+ placement.
Moreover, we can see that the signal was disrupted. It might indicate that something got in the way of LoRa’s signal transmission. It’d be great if you shared the photos of the base’s placement so that we can check it and see if anything blocks the LoRa radio.