@bernardo.barraza
Thank you for your reply, and yes, I agree, most of the GNSS processing programs that I’m familiar with don’t ask for the user to manually enter the appropriate orbital data. Instead, these softwares automatically will fetch the appropriate ephemerides based on the observation file. Most will also allow the user to choose, if available at the time, to use precise orbital data, again, being automatically fetched, or supplied by the user. In a similar fashion these other GNSS processing software will also automatically fetch all of the relevant CORS obs files, or alternatively allow the user to select specific multiple CORS which will then be automatically gotten for post processing and then finally arriving at a more robust least squares solution than what Emlid Studio v1.5 currently offers with its single baseline approach.
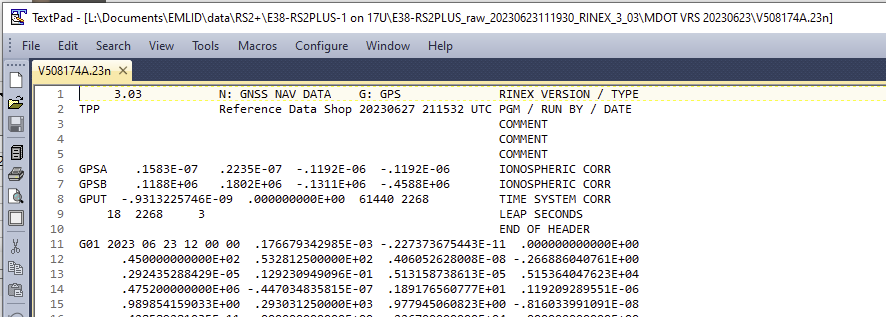
And yes, I fully agree about checking that I got the correct nav file (!!!) and I’m quite thankful for everybody helping to underscore this need!! Additionally, the CORS Site Log file lists the complete site history including the current receiver satellite system capabilities. It’s interesting to see when the equipment was last upgraded.
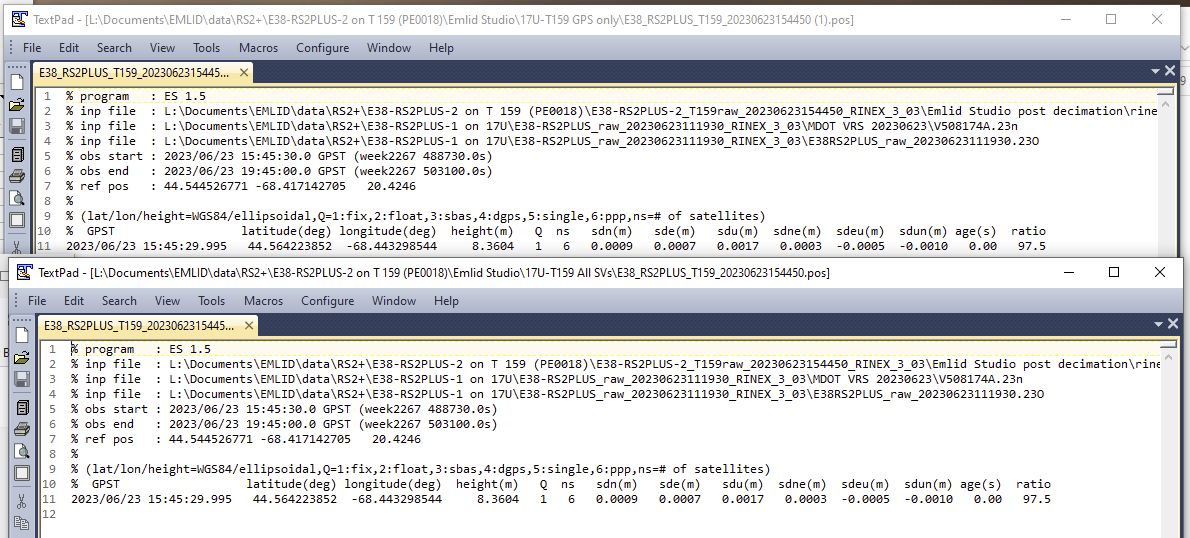
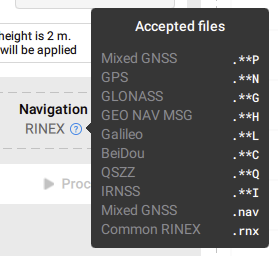
So in your experience working with Emlid Studio, and you were using CORS data, including the various individual .**n, .**g, .**l, etc. navigation files, what do you do? Do you process the same obs with each individual navigation file one at a time in Emlid Studio and then average their results?
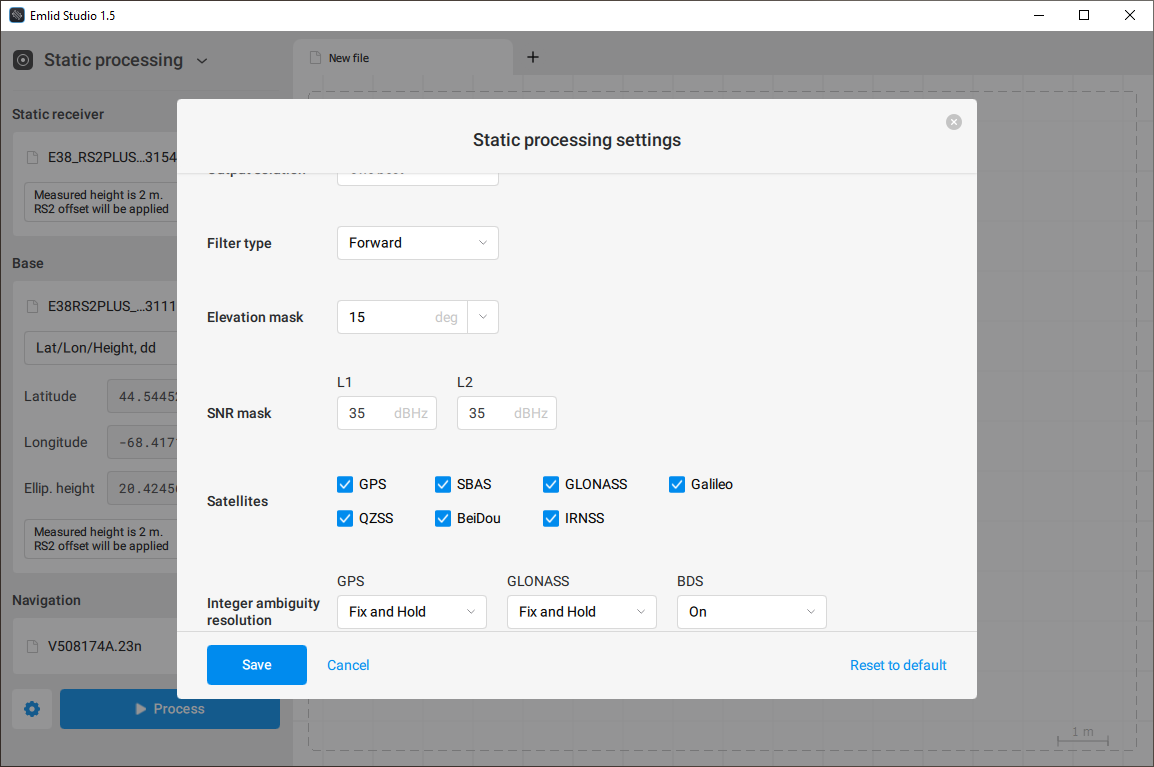
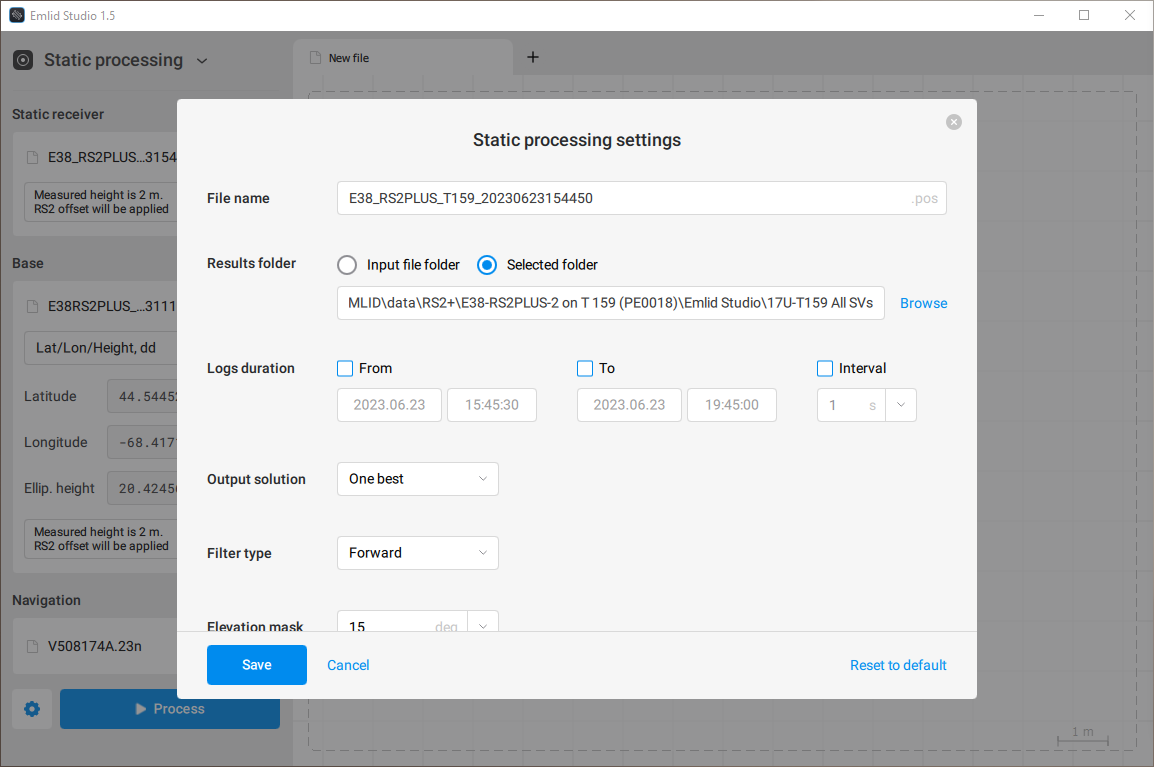
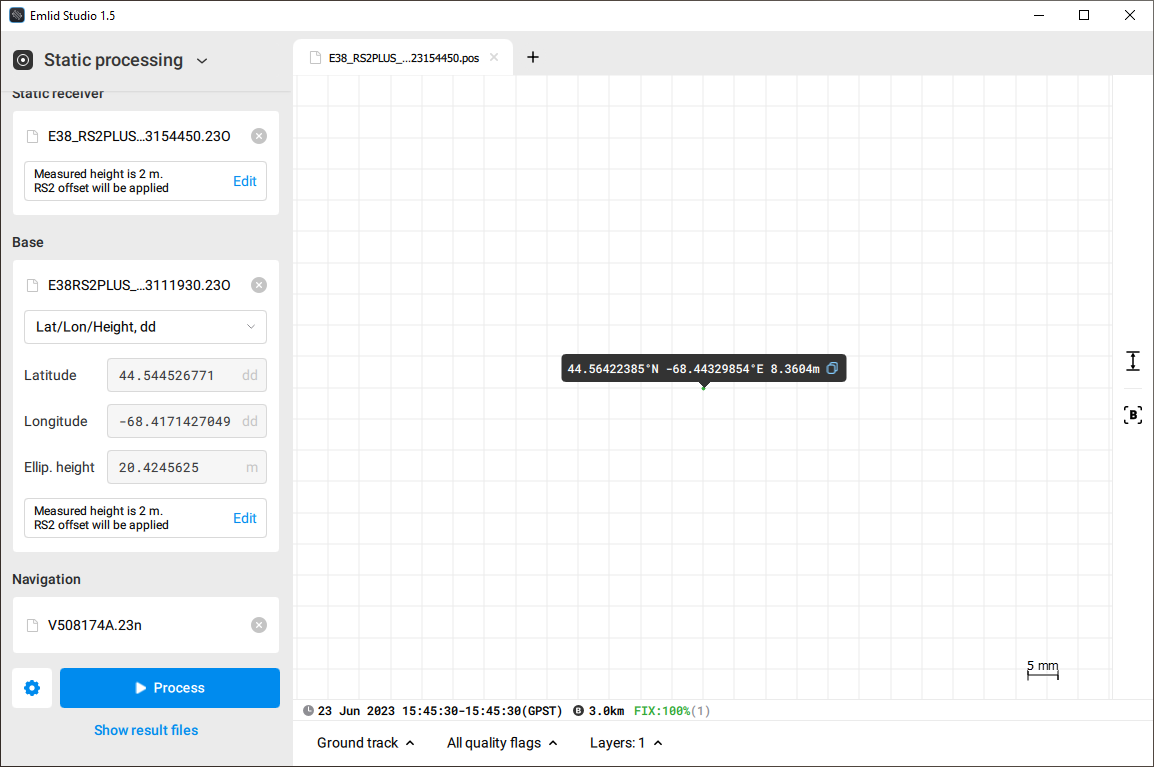
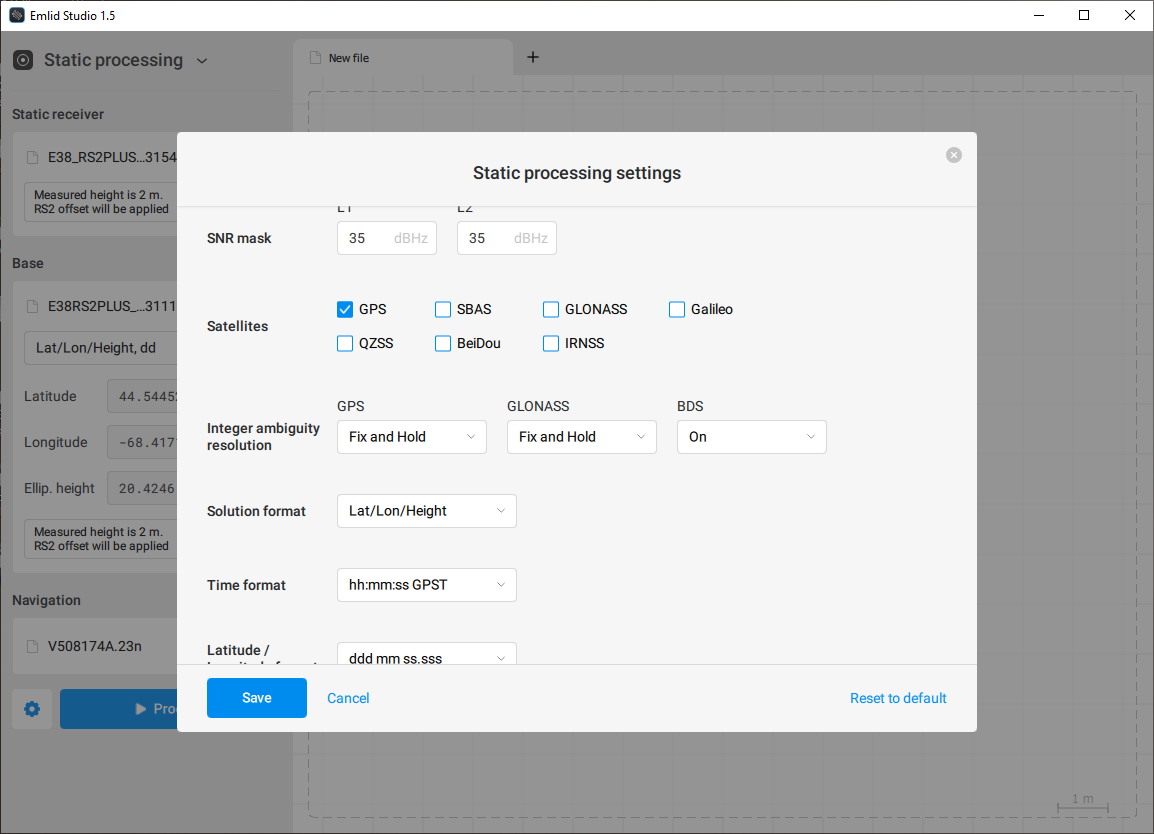
So I went back and performed a bunch of computations using the RS2+ .**p file and have fixed all of the various bits in the report that I’ve begun writing including fixing the illustration of where these 8 days of observations fall on the mark. But before making the final corrections, I thought that this image would be worth sharing as it shows the difference it makes using the correct nav file.
The (8) NRCAN and (8) OPUS post processed results were averaged and their 2D location was used to center the full scale georeferenced photo of the mark in Global Mapper Pro v24.1. Their points are accordingly shown fairly tight in 2D.
The larger diameter EmlidStudio icons represent the GPS only nav file post processed results, (8) MEPH & (8) VRS. The smaller diameter EmlidStudio icons show the benefits of including GLONASS in the (8) MEPH results, and the benefits of GLONASS and GALILEO in the (8) VRS results. And if you’re curious, MEPH is 34.4 kn from the mark 17U. The VRS is located just a few meters from 17U.