Hello everyone,
I’m not sure if this is the right forum, but I thought some of you might know this. I’m really new to RTKlib and there is a lot of stuff that I still don’t understand.
When I post process my data with regular RTKlib the .pos file coordinates does not align with the _events.pos file coordinates, and I don’t understand why. Is the _events.pos file not corrected with the data from the base station, or am I just doing something completely wrong?
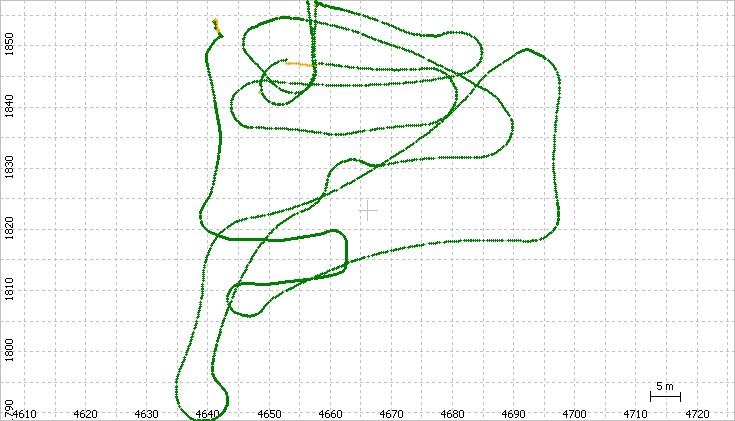
This is the .pos file coordinates (blue route) and the events (photos taken) as the yellow stars:

As you can see the some of the events are just scattered around the route while basically all the coordinates in the _events.pos file are Q=1.
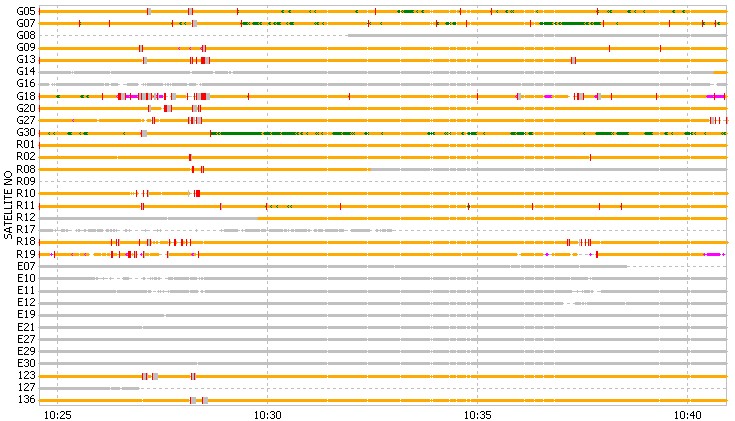
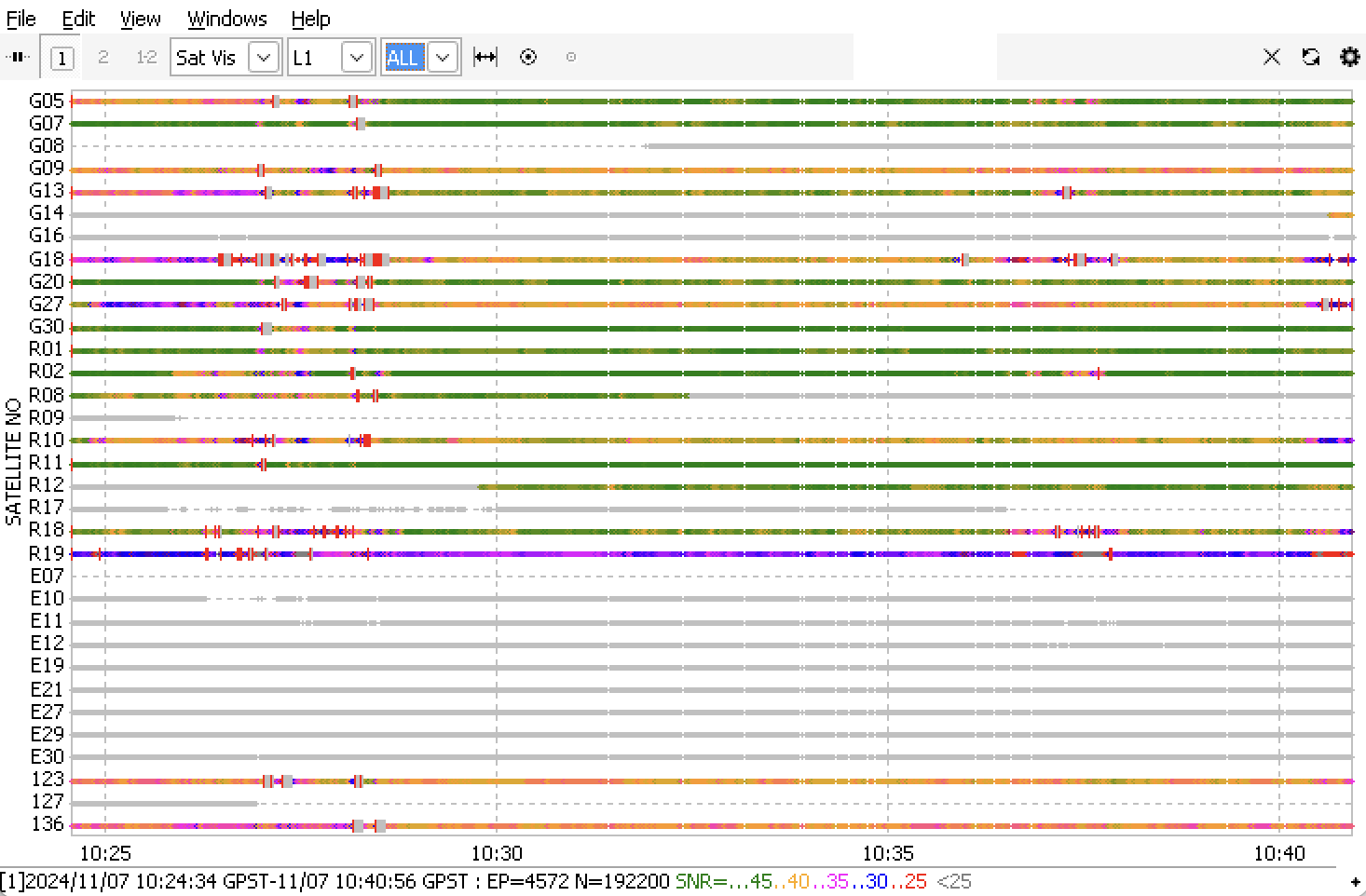
This is the result from the post processing:
I’ve read that RTKlib might not be the most reliable post processing tool, should we consider using another program to get better results? This is all for a project in University so we can’t really pay for a post processing tool though. When I use emlid i get somewhat better results but the events are still scattered around, I guess maybe it’s because we don’t have the emlid hardware?
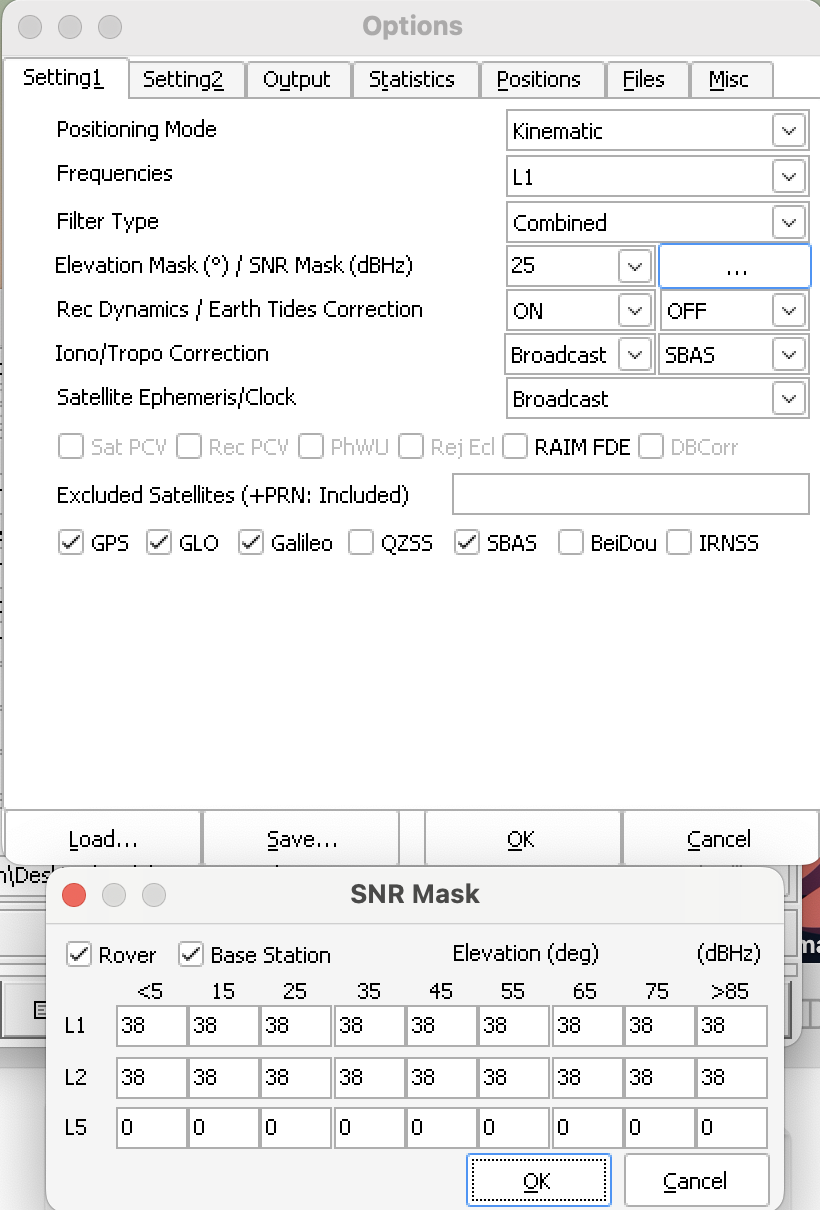
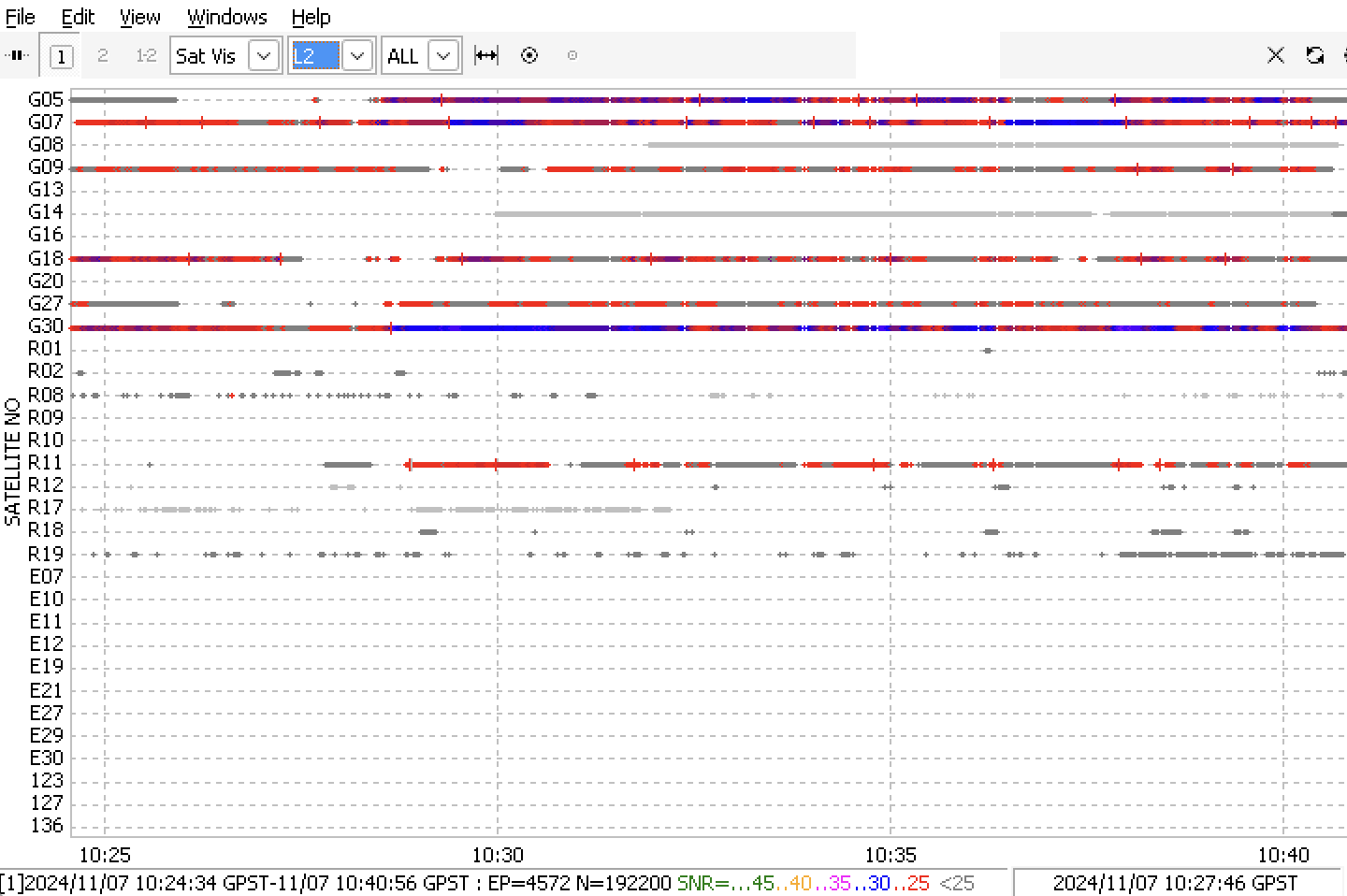
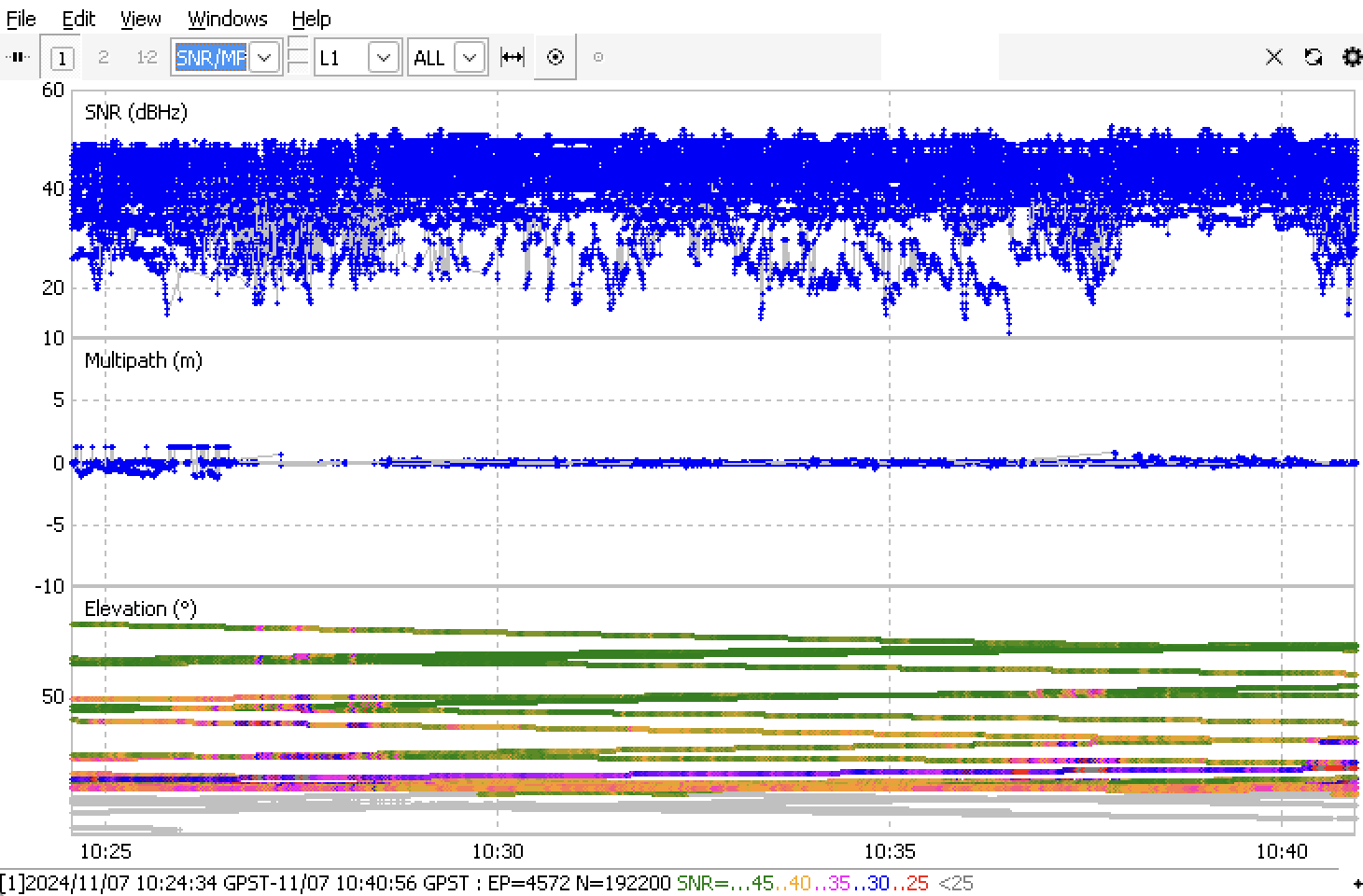
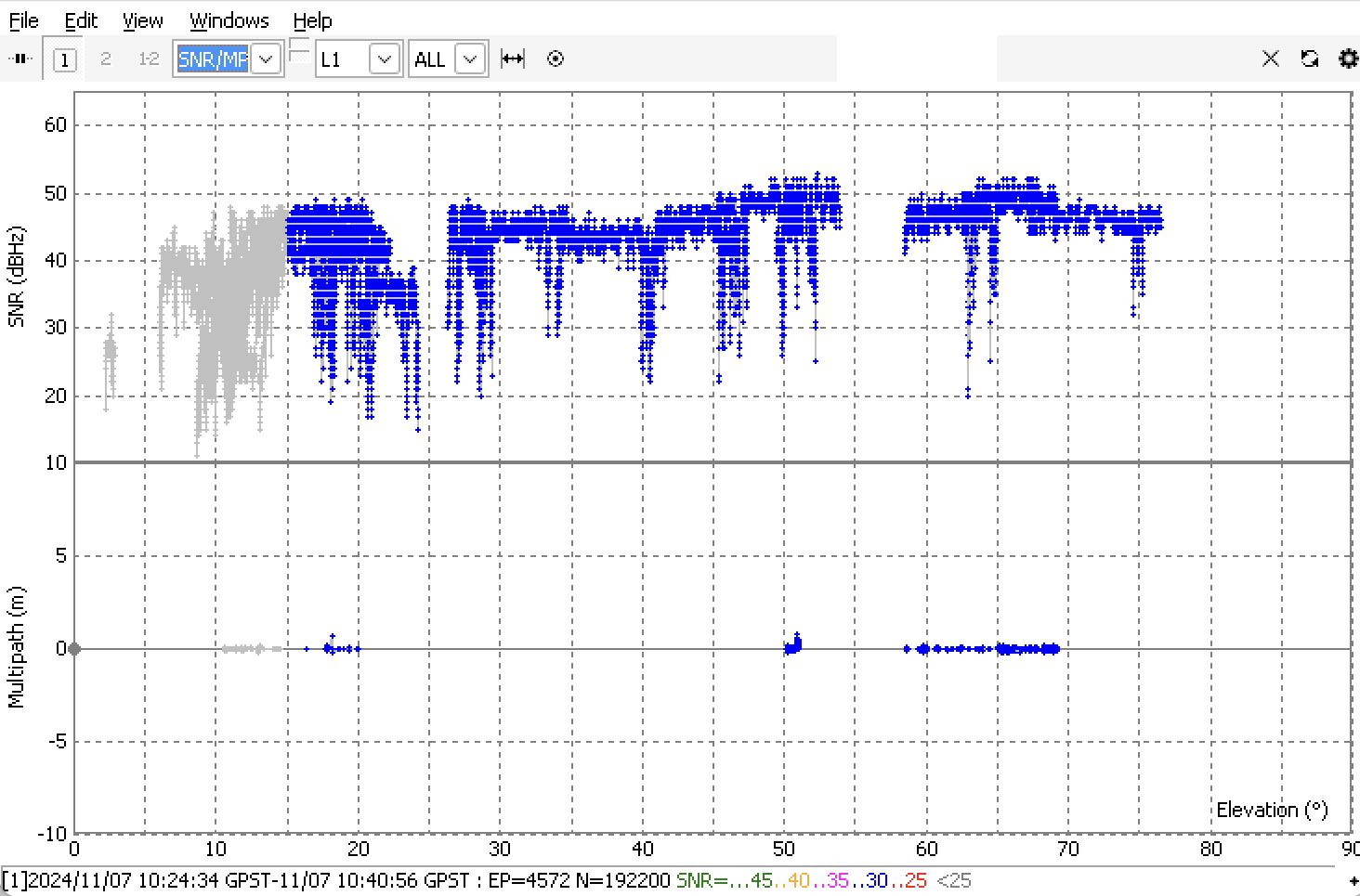
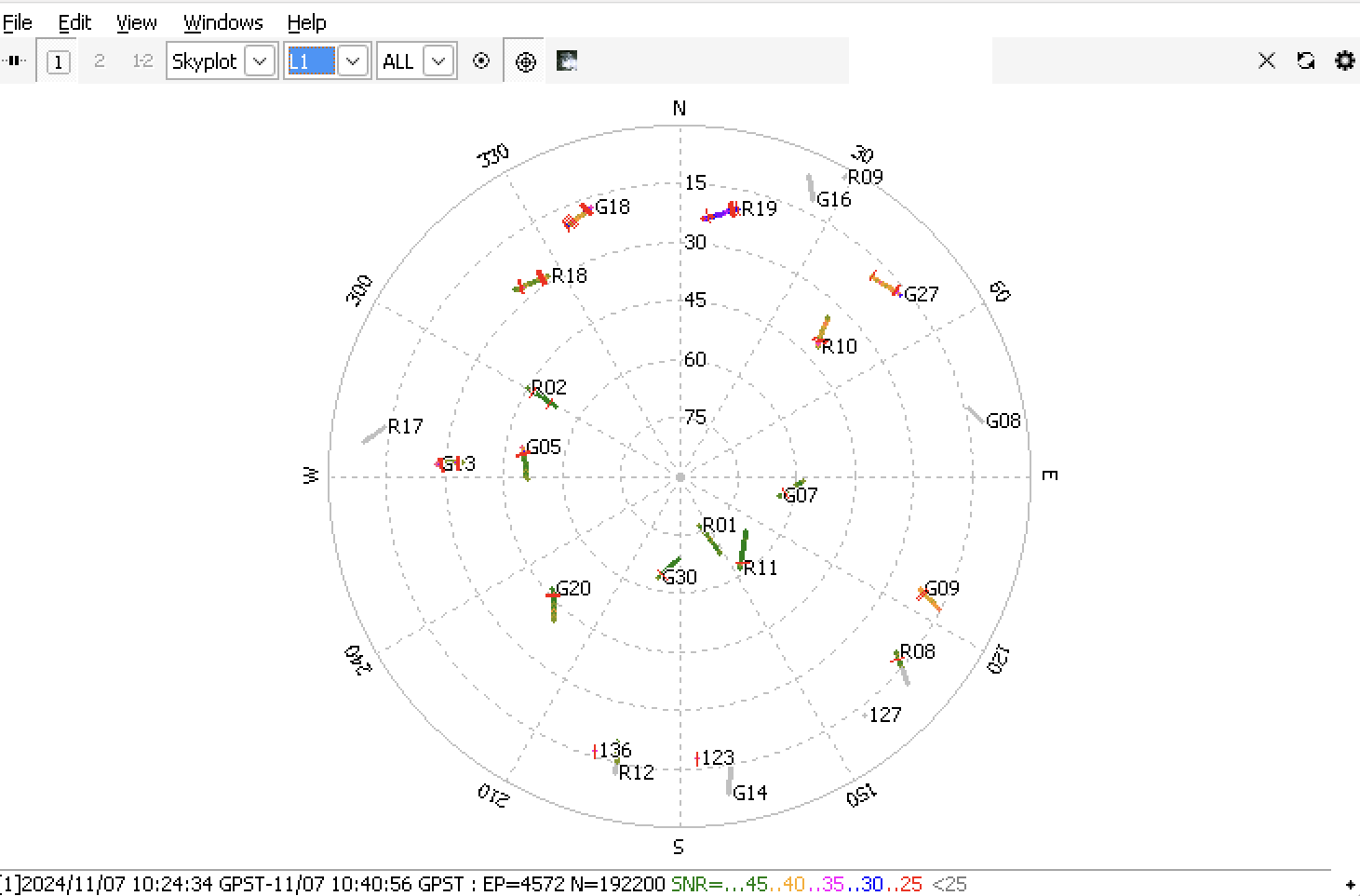
These are the results from rtkpost and plot + the settings:
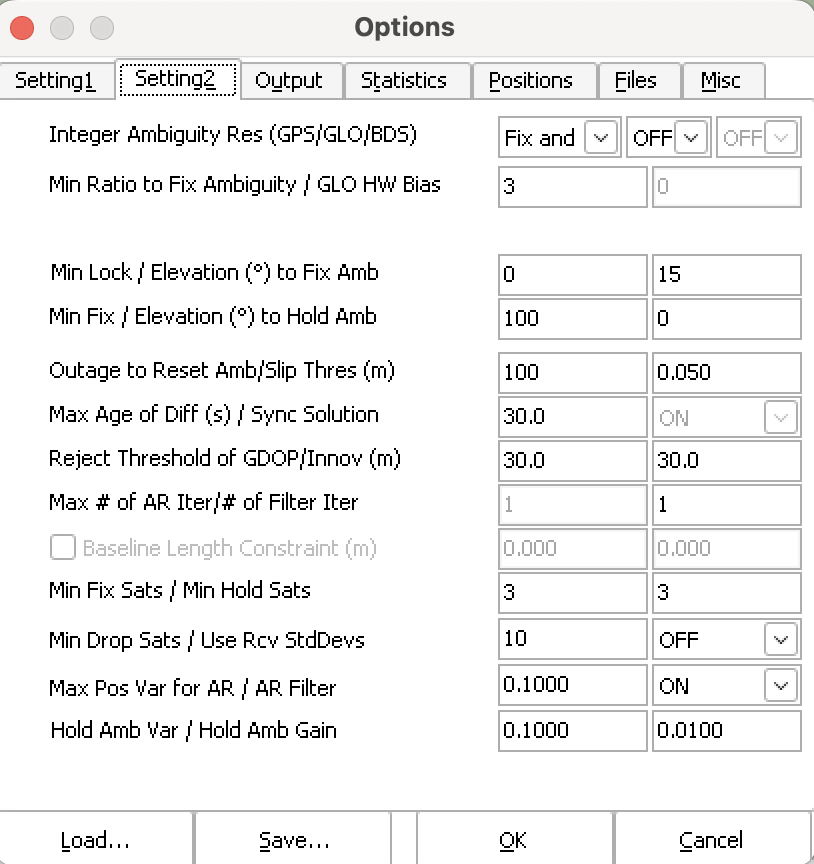
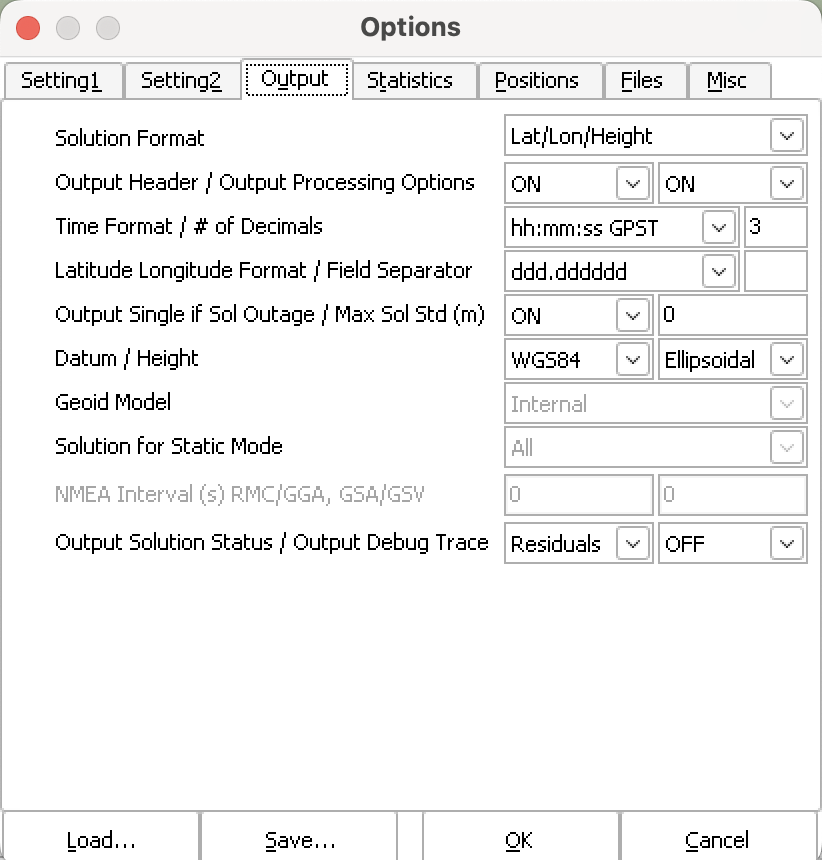
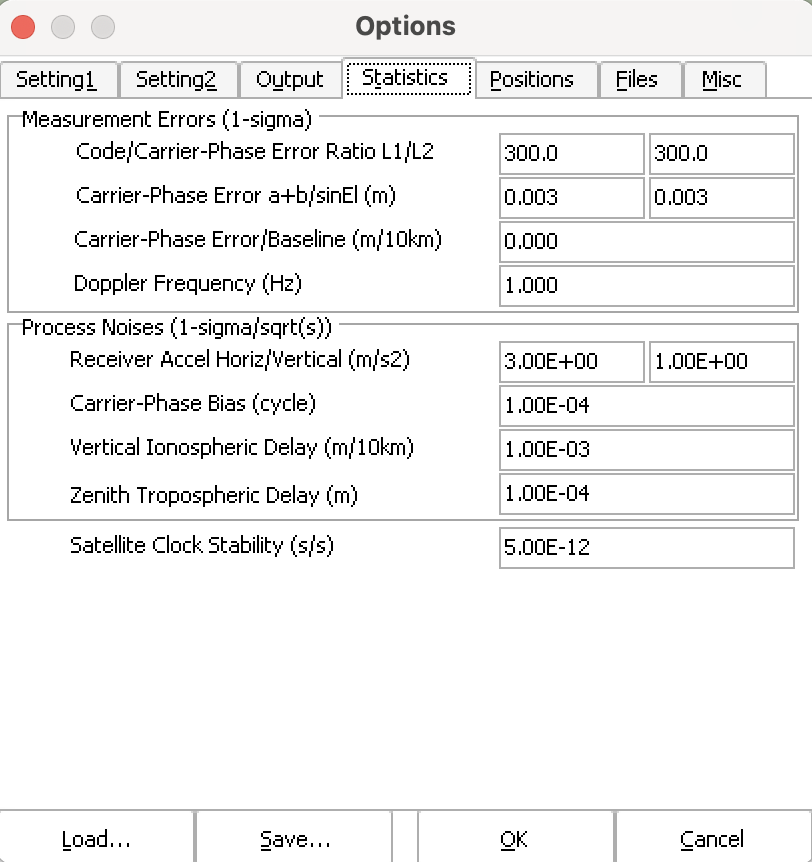
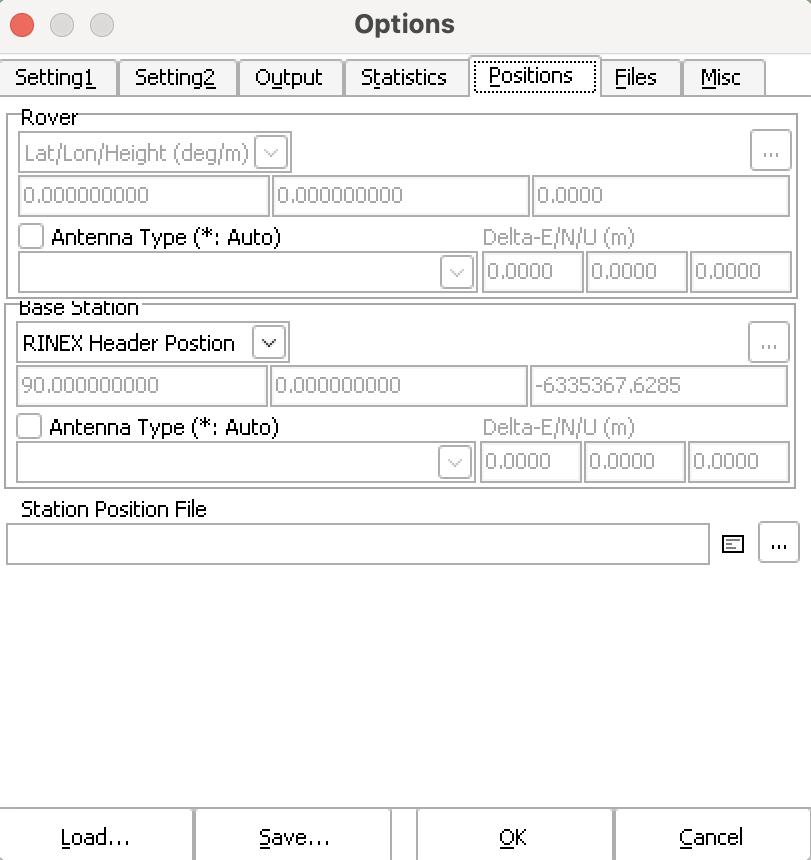
I would really appreciate if someone could explain all this to me.
Thanks!