



Hello,
I am trying to find a definitive answer of whether RTKLIB is handling the Antenna Reference Point (ARP) values entered in the Delta-E/N/U (m) fields correctly?
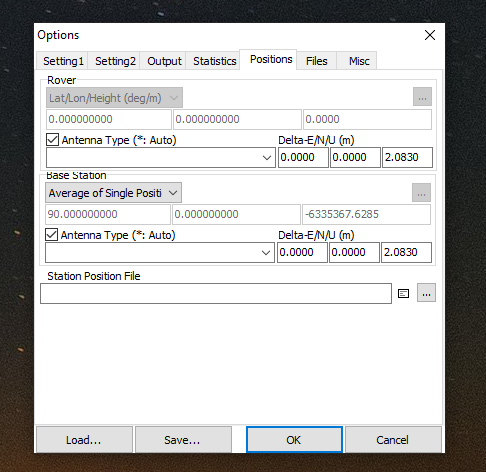
I am recording static data with a base station and rover using the same models of tripod and antenna so heights are both the same at 2.083 m. When I post-process the logs in RTKLIB (ver.2.4.3 b28) the ARP vaule for the base station adds elevation to the rover solution and the rover ARP subtracts from the solution (see below).
##################################
Elevation [m]; ARP; diff [m]
######### ############### ######
2290.626; none; n/a
2290.625; both base and rover; 0.000
2292.710; base only; 2.084
2288.541; rover only; -2.084
##################################
It makes sense for the rover ARP value to be subtracted from the solution, though I am not so sure why the base ARP value adds to the rover solution for DGPS. I could see it making sense for RTK but this is static data and no LoRa. What am I missing?
Thanks in advance for any valuable insight on this.
Cheers,
Christian