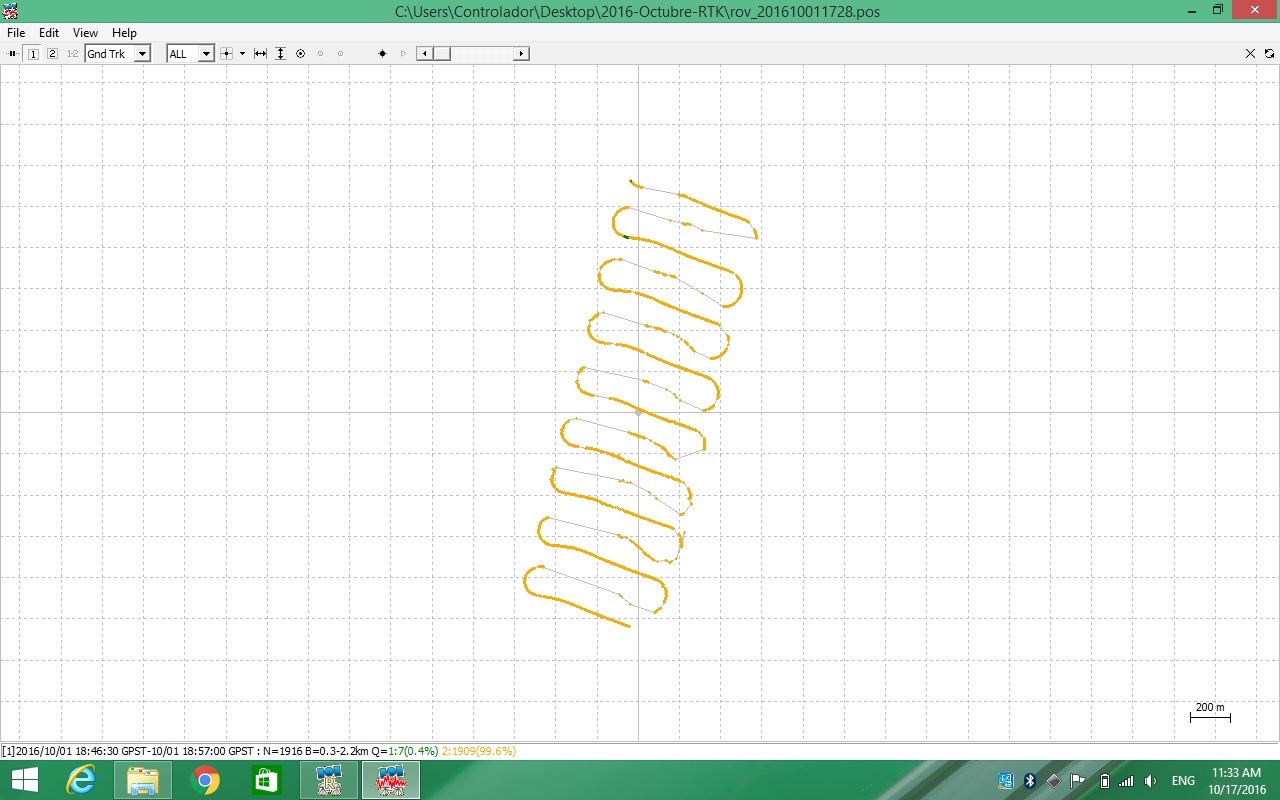
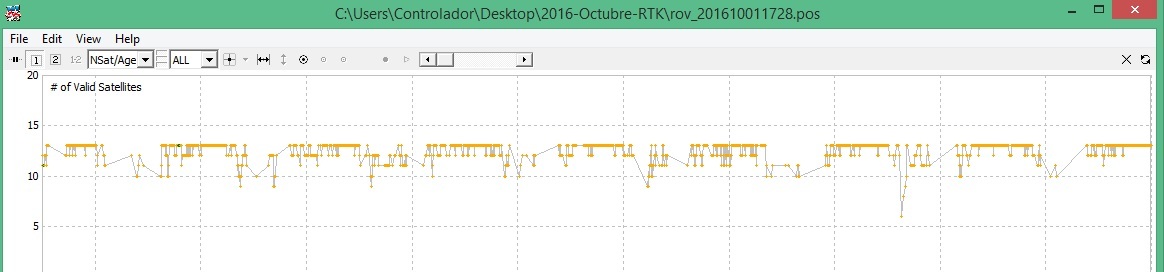
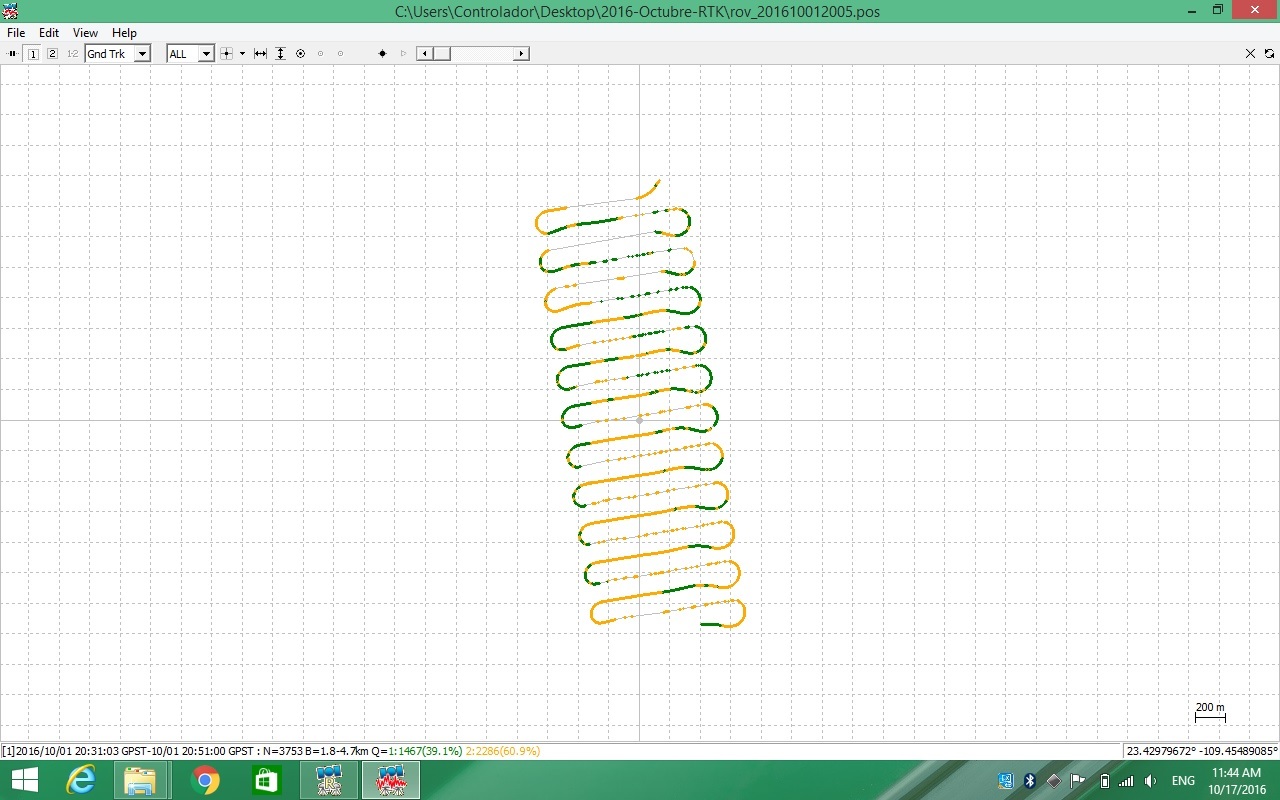
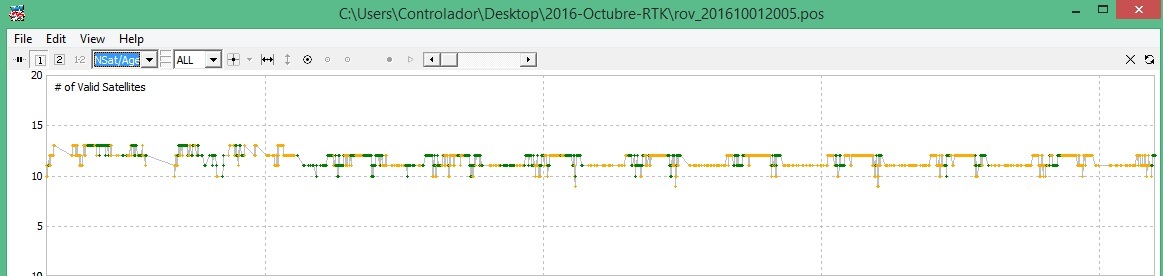
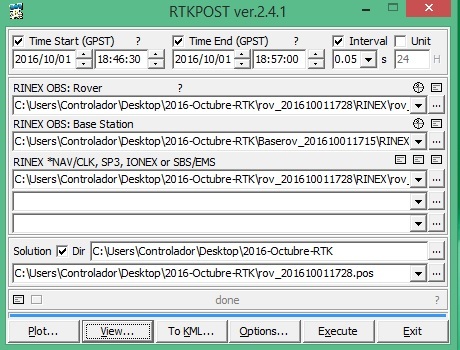
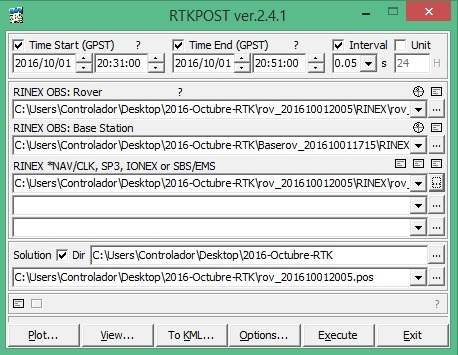
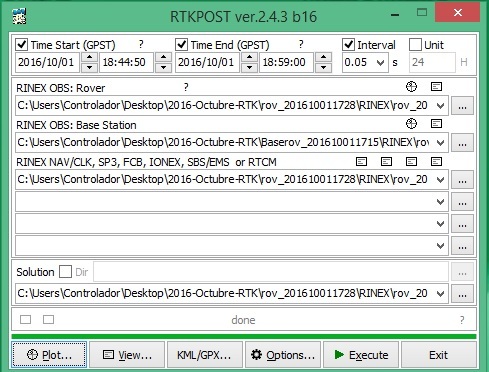
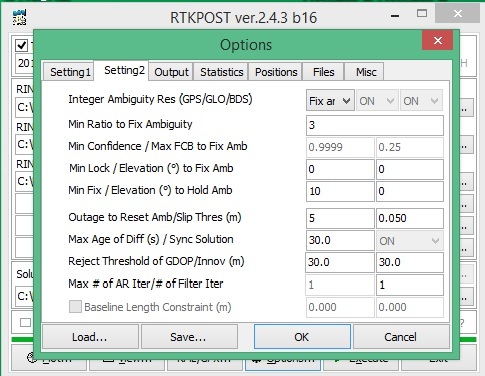
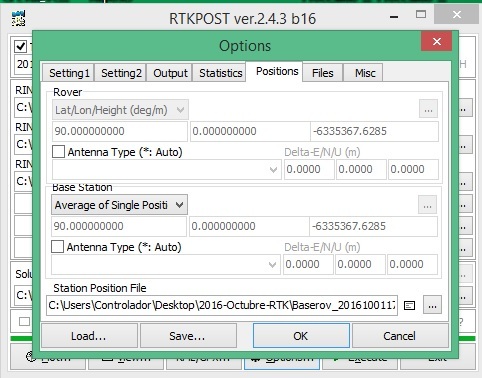
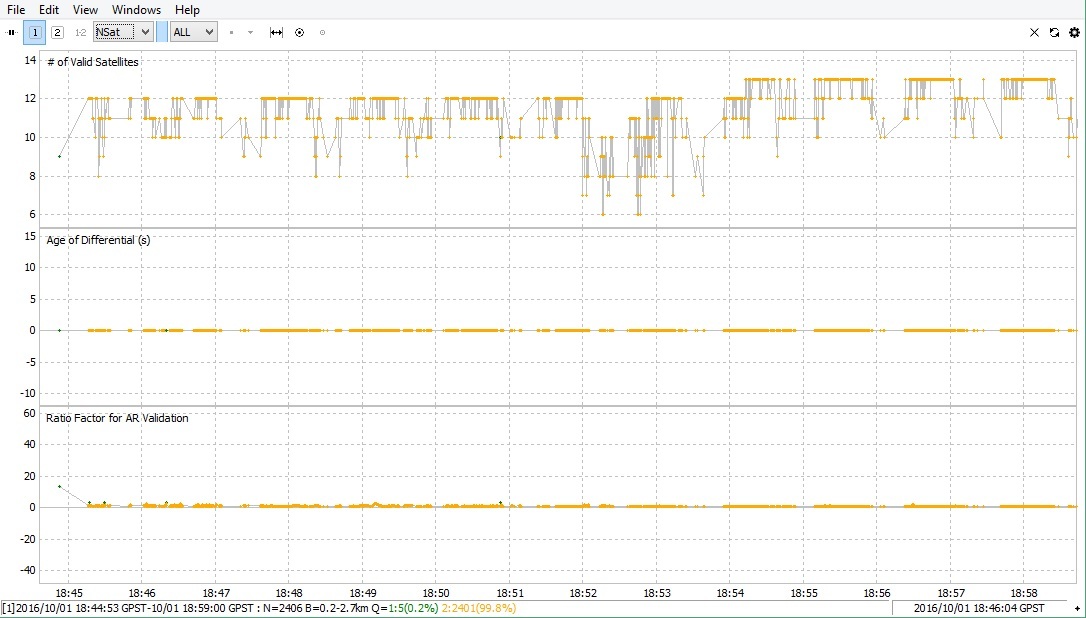
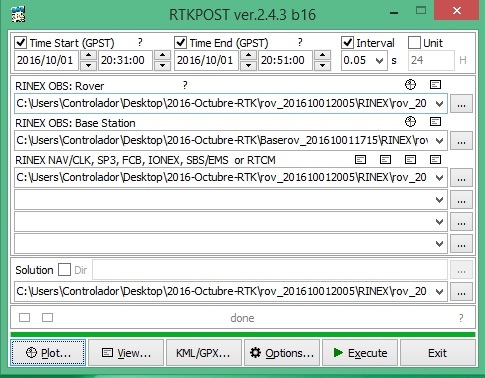
Hi! I’m post-processing with RTKlib 2.4.1, we used both Reach as rover mode, base was left logging for 3 hours approx. while rover was onboard UAV during 2 flights (one log for each flight, no modifications were made in between). Same RTKpost configuration for both logs with different outputs , worth to mention that at first I post-processed the whole log and then adjusted Time Start and Time End for our area and flight time of interest, this increased drastically the number of fixes in second log… not the same story for the first one.




 , worth to mention that at first I post-processed the whole log and then adjusted Time Start and Time End for our area and flight time of interest, this increased drastically the number of fixes in second log… not the same story for the first one.
, worth to mention that at first I post-processed the whole log and then adjusted Time Start and Time End for our area and flight time of interest, this increased drastically the number of fixes in second log… not the same story for the first one.