1.For moving rover, use kinematic and GPS AR on. For base, it really doesnt matter as long as you set the correct known coordinates (if you need absolute and not relative position. Average position is an option if you dont need absolute and correct coordinates) and activate base mode and forward signals to rover.
2. No output is needed, you can use base mode for out and correction data to rover, from rover you can e.g use output data to visually see output processed solution.
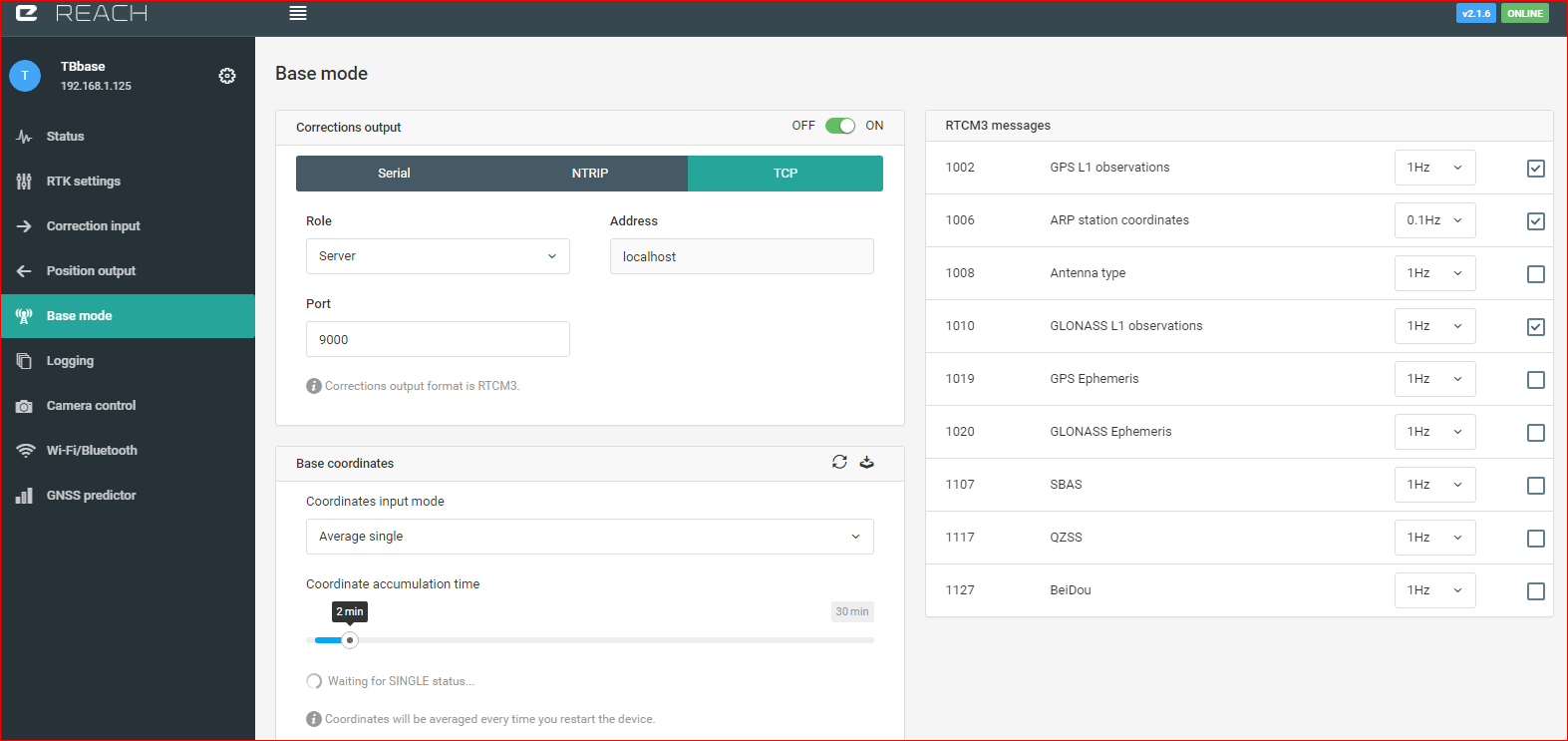
So, in base mode menu, you need to activate correction output to give correction data to rover.
_But for the purpose of just post processing and either of above is not needed, you only need to enable raw logging in the logging menu for both units and reading this for the rest https://docs.emlid.com/reach/gps-post-processing/._
I assume you have the camera trigger setup ok.
Continuous and Fix/hold usually does the trick.
Fix/hold could give you easier fix, but with corrupted data it can give ofset and not right coordinates. Its a bit complex but try continuous first and fix/hold second.