Hello, i am a land surveyor and have access to a paid network of reference stations emiting corrections in RTCM3 via Ntrip, and also own geodetic grade GNSS recievers.
Today i was comparing measurements between my reach and other high precision GNSS reciever, i was using a data collector with survCE to serve the corrections to the reach, i surveyed one point with reach using the folloing configuration:
30 observations.
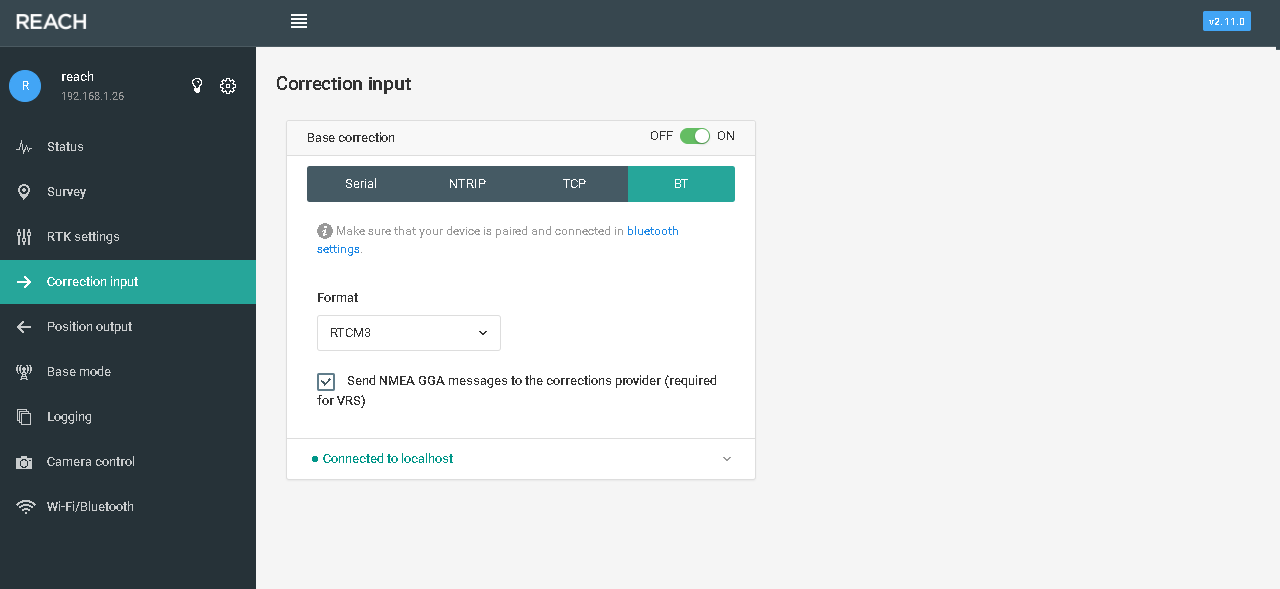
correction input: bluetooth RTCM3
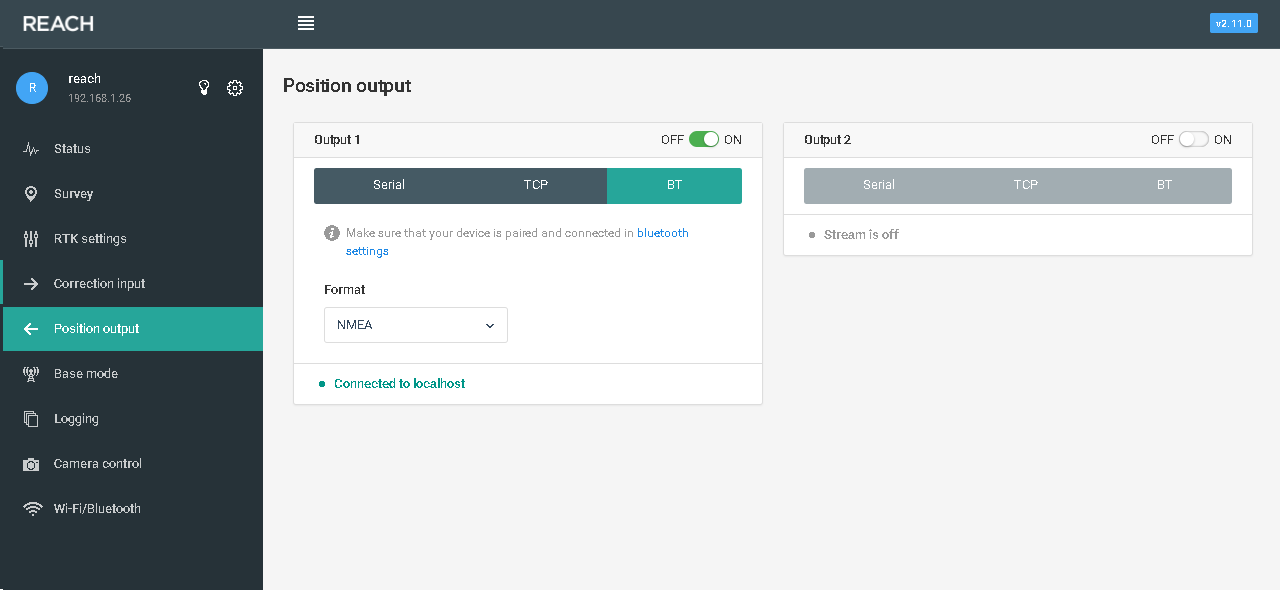
correction output: bluetooth RTCM3
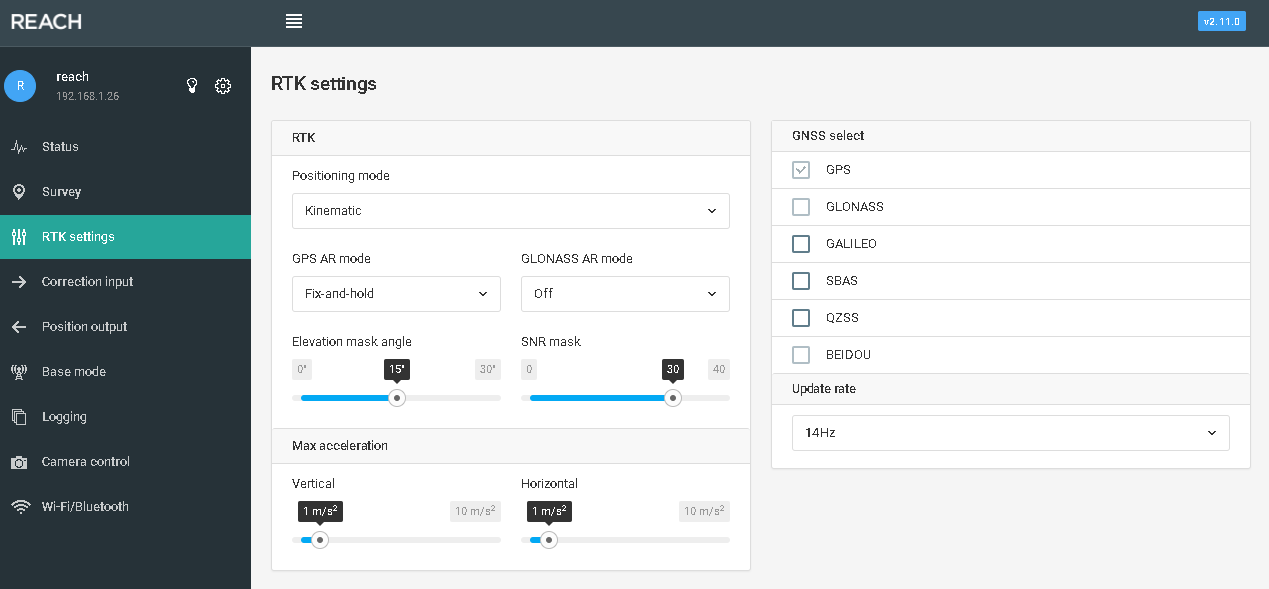
RTK settings: GPS only @14 HZ
and all other settings by default
Then, surveyed the same point using reach with the following configuration:
30 observations
correction input: bluetooth RTCM3
correction output: bluetooth RTCM3
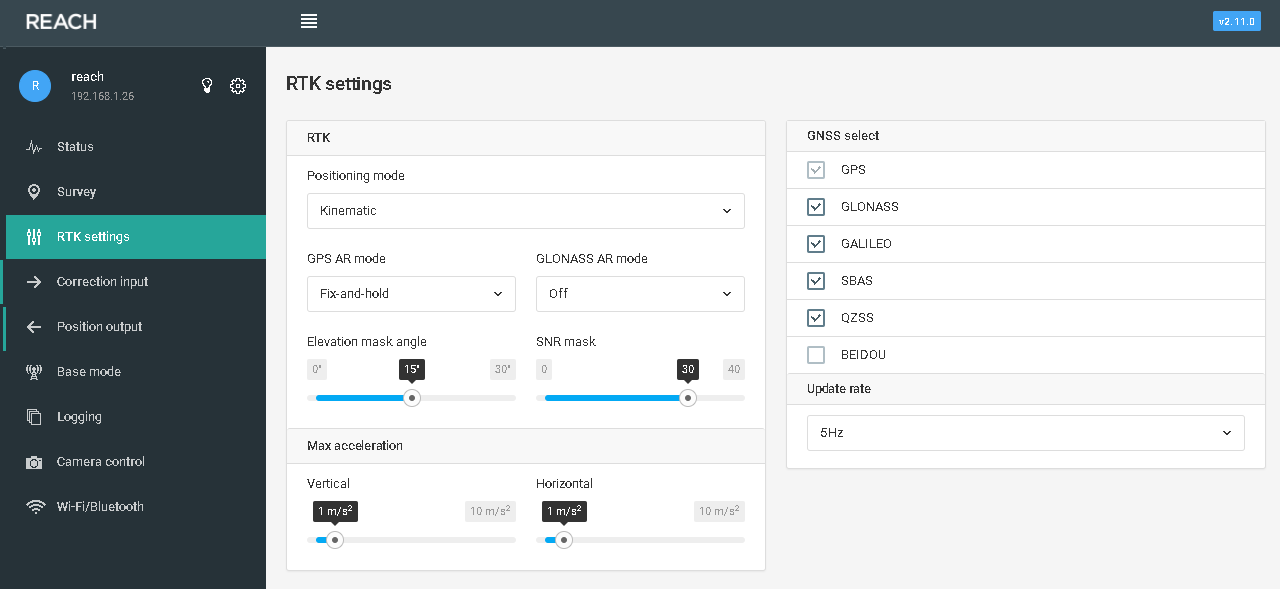
RTK settings: All constelations except Beidou @5 HZ
and all other settings by default.
There was a difference between the two points around 50 cm, so after that, i surveyed the same point using a Geomax Zenith 35 pro, conected to the same base station, the baseline was around 1.3 Km away.
In comparison to the Geomax, the first point had a difference of about 2 cm in X, and a few mm in Y, it is ok, considering that it was inside the Std of the rech when the point was surveyed.
The point surveyed using more constelations, had a bigger difference, around 50 cm, and considering the base reference station is only GPS+GLONASS, i asume the problem is with GLONASS.
I am thinking on make more comparison using both configurations to see if it is a concurrent event.
Is there any way you can help me to determine what is going on there? maybe sending some logs for be checked? i will apreciate your colaboration.
Thankyou.
,