I am analyzing some procedures with the M + receiver and REACHVIEW 2.22.4.
The arrangement I have includes, on the drone, an M + receiver with LoRa radio and a cable connected to the camera, which allows to M+ flag the moment of the taken photo.
For the base, I have an RS receiver.
As for real-time positioning (RTK), the procedures are not so clear.
Using my equipment, I obtained the RTK solution file in LLH format, which corresponds to the ‘.pos’ file of PPK processing (…) but I did not find a file referring to the moment markings of the photos (‘events.pos’ ) or a flag in the LLH file that indicates such moments.
I would like to know: is it possible to obtain the coordinates of the photos by RTK processing, without the need for post processing?
More specifically: Is there any ReachView output file that include the photo’s RTK positions?
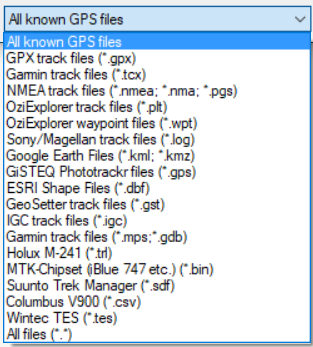
Try using Geosetter to retag the images. You can import any one of the files to use as a GPS track to batch edit all the images. In PPK this is done by creating a GPX files from the POS file out of RTKPOST.
For real-time writing of the RTK’d coordinate directly to the image you’ll have to completely bypass the GNSS stream from the camera and insert the stream from the Emlid and then figure out how to have it inserted.
You never said what drone and camera?
Yes my suggestion works for PPK, but can also be used to write collected RTK data.
Could be nice a system that can write the coordinate on the camera … but what I ask is if the REACHVIEW can report on file a list of coordinates that indicates the RTK solution for a given timemark obtained directly from the integration of camera and receiver… on a similar way of the post processing procedure.
The advantage could be get the coordinates from a processed RTK correction without the need of a post processing etapa.
The question is still the same: is there a way, on REACHVIEW, to obtain a RTK (real time) solution for a taken photo? This is a base issue for a RTK estimation of quality - with out post processing!
What I mean is: for a PPK solution, the procedure with EMLID’S receivers is at ‘state of art’.
I’d like to know if for RTK solution I could use them too… Without a post processing etapa.
I think my point is that while you are doing PPK you will need to do post-processing (re-tagging the photos) regardless. Geosetter is not just for PPK workflows. Currently the only way that you are going to capture a stream and tag photos real-time is with a piece of hardware and code your own algorithm or piggy-back off of someone else’s. There is nothing processed in Reach(view) that is immediately ready to do this.
Regardless, I will stick with my recommendation of PPK and that if you are doing professional certifiable work that trusting RTK alone is a bad business plan.
I would email support@emlid.com for more custom solutions such as this. It would probably be good for there documentation as well with progression in the technology.
Thanks for the discussion on this. In the meantime, we don’t offer a solution for mapping in RTK mode. We only have it for PPK since it is more reliable.